Кыргызстан, г. Ош


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 27.03.2024 13:43

Нарматалиев Мирлан Давлаталыевич
преподаватель
37 лет
Местоположение
Специализация
Тарантул робот вездахот
Категория:
Информатика
13.11.2023 20:00

Просмотр содержимого документа
«Тарантул робот вездахот»

ТЕХПАСПОРТ “ТАРАНТУЛ”
Город Ош. Юниоры
Введение
Виды шаговых механизмов
1
Шаговые механизмы и устройства
2
3
Наша модель
4
Вложения
5
Список используемой литературы
Введение
В природе редко встречаются прямые линии и плоские поверхности. Это исключения. Подавляющее большинство поверхностей криволинейные. И это не только природные. За долгие годы вмешательства человека в природу накопилось немало поверхностей искусственного происхождения, появившихся в результате различной технологической деятельности. Речь здесь идет, прежде всего, о земной поверхности и такого рода поверхности принято называть сложной (пересеченной) местностью. Для перемещения по такой местности строят дороги, если в этом есть необходимость. Но не везде такое строительство возможно по техническим условиям и не всегда экономично, что немало важно, а перемещаться требуется. Для перемещения на большие расстояния люди научились летать, создавая самолеты и различные летающие устройства. Но, не смотря на это, самолет не имеет возможности приземляться на любых поверхностях. Поэтому для них стоят аэропорты. Исходя из того, что использовать летающие средства передвижения не всегда возможно, а порой экономически не выгодно, существует спрос на изобретение средств передвижения по пересеченной местности
Виды шаговых механизмов
В машиностроении, и прежде всего, в технологическом оборудовании автоматического и полуавтоматического действия, как правило, используются механизмы прерывистого действия, в частности: для привода поворотных столов, шаговых транспортеров, периодической подачи в рабочую зону оборудования материала бесконечной длины (ленты, проволоки), а также для сообщения движения с остановками выходным звеньям исполнительных и вспомогательных механизмов.
Для этого используются: 1. Кулачковый механизм; 2. Мальтийские механизм; 3. Механизмы свободного хода (храповые, ролико-клиновые); 4. Различные виды подач; 5. Улито-цевочные механизмы; 6. Рычажные механизмы с периодической остановкой выходного звена; 7. Специальные механизмы
Шаговые механизмы и устройства
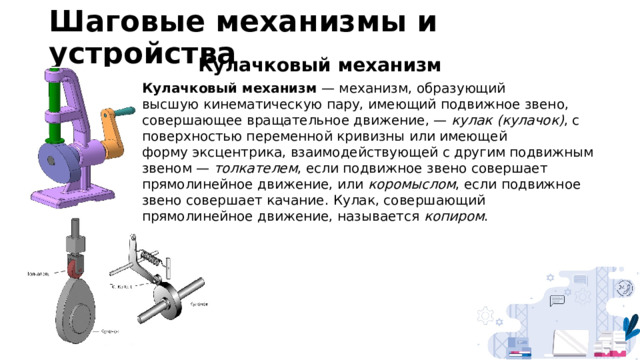
Кулачковый механизм
Кулачковый механизм — механизм, образующий высшую кинематическую пару, имеющий подвижное звено, совершающее вращательное движение, — кулак (кулачок) , с поверхностью переменной кривизны или имеющей форму эксцентрика, взаимодействующей с другим подвижным звеном — толкателем , если подвижное звено совершает прямолинейное движение, или коромыслом , если подвижное звено совершает качание. Кулак, совершающий прямолинейное движение, называется копиром .
Кулачковый механизм применяется:
- в топливных насосах автомобильных карбюраторных двигателей ;
- в механическом (пневматическом) приводе колодочных тормозов (грузовики, тракторы);
- в приводе воздушной заслонки карбюраторов;
- в механизмах переключения коробок передач мотоциклов;
- в швейных машинках (механические переключатели режимов, варианты движения рабочих органов);
- в шарманках и музыкальных шкатулках (вырожденный кулачок — шип — только включает звук в определённый момент);
- в металлорежущих станках;
- и многих других машинах для воспроизведения сложной траектории движения рабочих органов и выполнения функций управления, таких, как включение и выключение рабочих органов по определённой схеме.

Мальтийский механизм
Наибольшее распространение механизмов прерывистого действия получили мальтийские механизмы, которые используются в поворотных устройствах токарных автоматов и агрегатных станков, в поворотно – фиксирующих устройствах полиграфических машин и упаковочного оборудования, а также в оборудовании для пищевой и легкой промышленности.
Механизм преобразует равномерное вращение ведущего вала в скачкообразное вращение ведомого, на котором закреплён скачковый барабан , непосредственно осуществляющий прерывистое перемещение киноплёнки.
Мальтийские механизмы используются не только в киноаппаратуре и бывают с внешним и внутренним зацеплением, и, как правило, с числом пазов от 3 до 12.

Храповые механизмы
Храповой механизм (храповик) — зубчаты й механизм прерывистого движения , предназначенный для преобразования возвратно-вращательного движения в прерывистое вращательное движение в одном направлении. Проще говоря, храповик позволяет оси вращаться в одном направлении и не позволяет вращаться в другом. Храповые механизмы используются достаточно широко — например, в турникетах , гаечных ключах , заводных механизмах, домкратах , лебёдках , замках наручников и т. д.
Храповик обычно имеет форму зубчатого колеса с несимметричными зубьями, имеющими упор с одной стороны. Движение колеса в обратную сторону ограничивается собачкой , которая прижимается к колесу пружиной или под собственным весом.
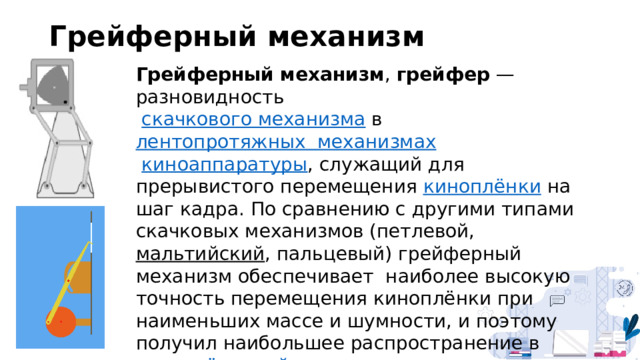
Грейферный механизм
Грейферный механизм , грейфер —разновидность
скачкового механизма в лентопротяжных механизмах
киноаппаратуры , служащий для прерывистого перемещения киноплёнки на шаг кадра. По сравнению с другими типами скачковых механизмов (петлевой, мальтийский , пальцевый) грейферный механизм обеспечивает наиболее высокую точность перемещения киноплёнки при наименьших массе и шумности, и поэтому получил наибольшее распространение в киносъёмочной аппаратуре .
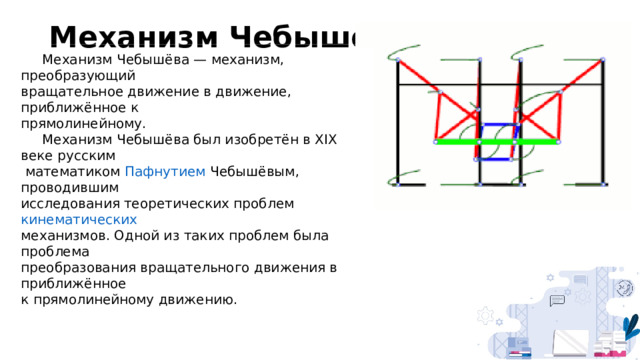
Механизм Чебышева
Механизм Чебышёва — механизм, преобразующий
вращательное движение в движение, приближённое к
прямолинейному.
Механизм Чебышёва был изобретён в XIX веке русским
математиком Пафнутием Чебышёвым , проводившим
исследования теоретических проблем кинематических
механизмов. Одной из таких проблем была проблема
преобразования вращательного движения в приближённое
к прямолинейному движению.

Наша модель
- Рассмотрев все варианты для построения системы, предназначенной для преодоления пересеченной местности, мы рассматривали варианты систем колесных, шнековых, гусеничных и летающих, но в каждой из систем были свои подводные камни. В итоге мы решили остановиться на системе шагового механизма.
Шагоходы
Шагоходы, или шагающие машины, — разнообразные машины , передвигающиеся при помощи сгибающихся или вращающихся на шарнире опорных конструкций («ног»), методом их синхронизированной поступательной перестановки (внешне напоминающей шаг человека или животного, т. е. машины на «шагающем» ходу) с гидравлическими , механическими , электрическими и другими приводами указанных конструкций и их комбинациями - электромеханическими ,
гидромеханическими и т. д.
- Наша модель была сконструирована по принципу механизма Тео Янсена. Тео Янсен - нидерландский художник и кинетический скульптор. Известен своими особыми кинетическими скульптурами, напоминающими скелеты животных , способными передвигаться под воздействием ветра по песчаным пляжам.

Ввиду конструктивной сложности исполнения, неясности целевого предназначения , и как следствие, неопределённости сферы практического применения с одной стороны, а с другой стороны — дешевизны, надёжности и простоты в эксплуатации сухопутных машин на традиционных вариантах подвижной платформы (в первую очередь, колёсной , гусеничной ,
рельсовой , канатно-тросовой , а также фрезерно-кольцевой , магнитно- левитационной и др.), шагающие машины пока не получили в реальной жизни большого распространения. Из используемых на практике механизмов можно назвать шагающие экскаваторы . Другими немаловажными факторами, препятствующими внедрению их в промышленность и народное хозяйство и требующими решения, являются энергозатраты, относительно высокие сами по себе и возрастающие по мере увеличения массы перемещаемого тела машины, длины подвижных опорных конструкций и амплитуды шага, а также вестибулярные нагрузки на человека-оператора ввиду неустойчивого положения кабины оператора в «двуногих» и «четвероногих» моделях
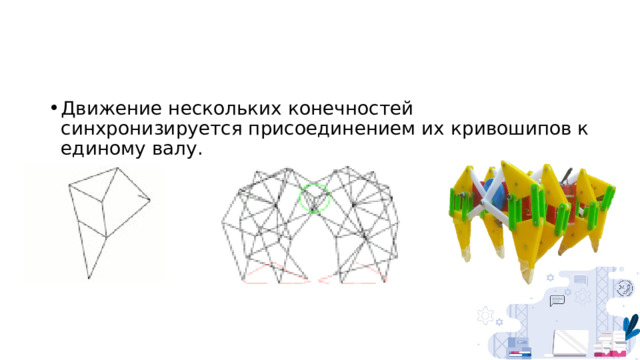
- Движение нескольких конечностей синхронизируется присоединением их кривошипов к единому валу.
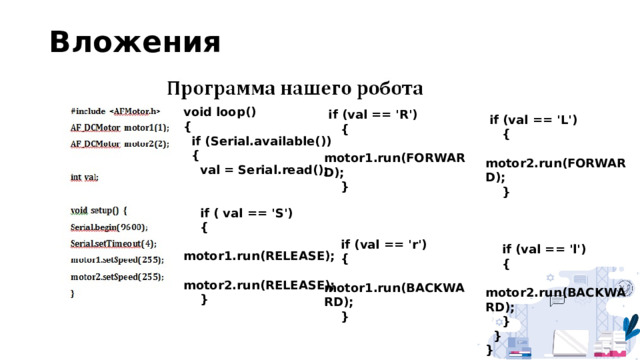
Вложения
void loop()
{
if (Serial.available())
{
val = Serial.read();
if ( val == 'S')
{
motor1.run(RELEASE);
motor2.run(RELEASE);
}
if (val == 'R')
{
motor1.run(FORWARD);
}
if (val == 'r')
{
motor1.run(BACKWARD);
}
if (val == 'L')
{
motor2.run(FORWARD);
}
if (val == 'l')
{
motor2.run(BACKWARD);
}
}
}
Наш робот в активном режиме
Спосибо за внимание. Көңүл бурганыңыздарга чоң рахмат!! Юниор












Вебинар для учителей
Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ