Россия, г.п.Федоровский


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 24.05.2024 08:45

Ибатуллина Наиля Равильевна
педагог дополнительного образования
Местоположение
Специализация
Разработка занятия по теме"Автоматическая кормушка", объединение "Промробо"
Категория:
Информатика
20.04.2022 20:20

Просмотр содержимого документа
«Разработка занятия по теме"Автоматическая кормушка", объединение "Промробо"»
5
Практическая работа: Автоматическая кормушка для рыб (или животных)
Расшифровать слова, записать их в таблицу №1.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Создать таблицу, заполнить (наименование) из расшифровки в п.1
| № п.п. | Наименование | Внешний вид | Количество |
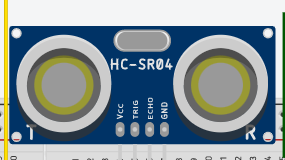
| | Ультразвуковой датчик расстояния |
| 1 |
| | Макетная плата малая |
| 2 |
| | ЖК-экран |
| 1 |
| | Ардуино УНО |
| 1 |
| | Провода |
|
|
| | Резистор- 1 кОм |
| 1 |
| | Пироэлектрический ИК-датчик |
| 1 |
| | Микросервопривод |
| 1 |
Собрать схему
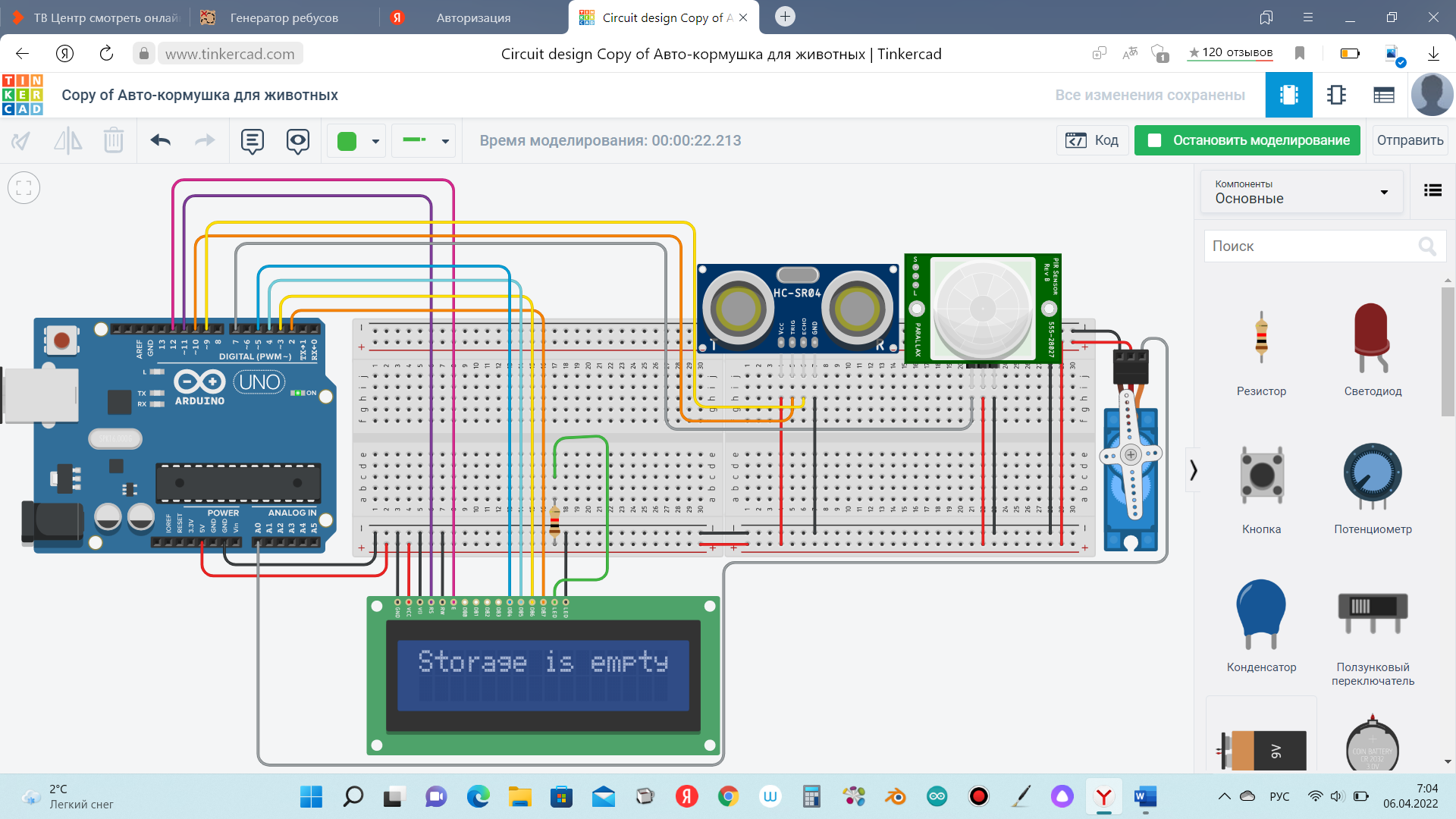
Ввести код.
Проверить работу схемы.
#include
#define trigPin 10
#define echoPin 9
const uint8_t datch_feed = 7;
const uint8_t r = 90;//сделал переменную, что б можно было
//удобно подстроить градус поворота к каждой кормушке
Servo servo;
LiquidCrystal lcd(11,12,5,4,3,2);
void setup() {
lcd.begin(16,2);
servo.attach(A0);
servo.write(0);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
}
void loop() {
long durationindigit, distanceincm;
digitalWrite(trigPin, LOW);
delay(2);
digitalWrite(trigPin, HIGH);
delay(10);
digitalWrite(trigPin, LOW);
durationindigit = pulseIn(echoPin, HIGH);
distanceincm = (durationindigit * 0.034) / 2;
Serial.println(distanceincm );
if (distanceincm
lcd.clear();
servo.write(90);
lcd.print(" Waiting...");
Serial.println("Waiting...");
delay(2000);
servo.write(0);
feed_contror();
}
}
void feed_contror(){
while(true){
if(digitalRead(datch_feed)==LOW){
lcd.clear();
lcd.print("Storage is empty");
Serial.println("Storage is empty");
break;
}
if(digitalRead(datch_feed)==HIGH){
lcd.clear();
lcd.print(" Complete");
Serial.println("Complete");
break;
}
}
}
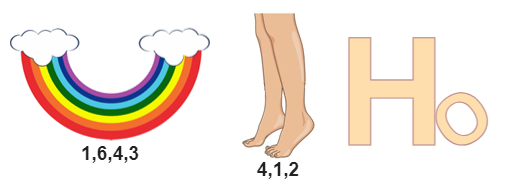
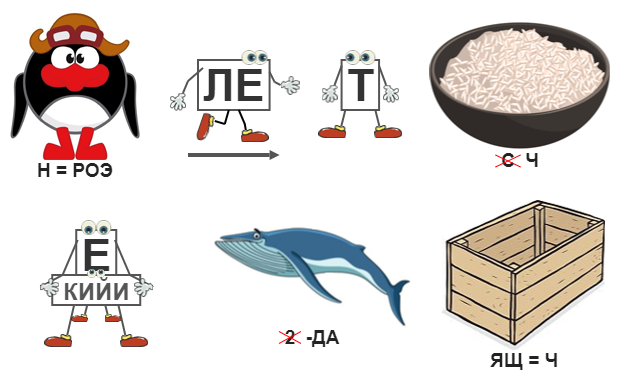
Ребусы с ответами к схеме: автоматическая кормушка
1. провод 2.
провод 2. жк-экран
жк-экран
3. 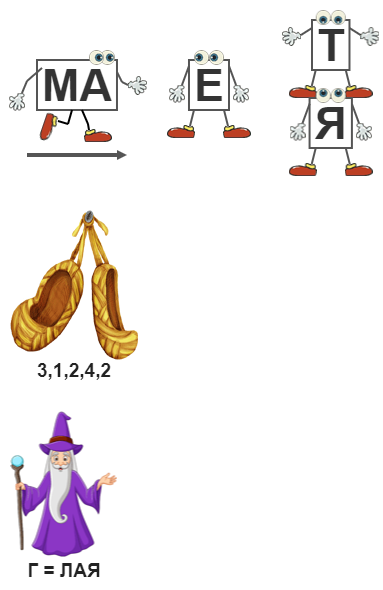 макетная плата малая
макетная плата малая
4. резистор
резистор
5.  ардуино УНО
ардуино УНО
6.  пироэлектрический датчик
пироэлектрический датчик
7.  микросервопривод
микросервопривод












Вебинар для учителей
Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ