Россия, п. Глушково


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 13.02.2024 11:32

Шевцова Любовь Николаевна
Учитель
49 лет
Местоположение
Специализация
Рабочая программа (Точка роста) _ Управление беспилотными летательными аппаратами
Категория:
Естествознание
22.09.2022 19:12

Просмотр содержимого документа
«Рабочая программа (Точка роста) _ Управление беспилотными летательными аппаратами»
Муниципальное казенное общеобразовательное учреждение
«Глушковская средняя общеобразовательная школа»
Глушковского района Курской области
Принята Утверждена
на педагогическом совете приказом директора школы
протокол № __ от ___________ приказ № ______
Председатель педагогического совета от ________ 2021 г.
________А.Э.Романчиков Директор МКОУ
«Глушковская средняя
общеобразовательная школа»
_______ А.Э. Романчиков

Рабочая программа
внеурочной деятельности
«Управление беспилотными летательными аппаратами»
Технологическая направленность
Класс_________________________8-9______________________________
Программа составлена МО учителей математики, физики___
и информатики_______________________
Срок реализации программы ___2021 - 2022 учебный год_____________
Содержание
Пояснительная записка………………………………………………..3
Учебно-тематический план…………………………………………...5
Содержание программы………………………………………………5
Методическое обеспечение …………………………………………..6
Список литературы…………………………………………………….7
Приложения ……………………………………………………………8
Пояснительная записка
Современное состояние общества требует интенсивного развития передовых наукоемких инженерных дисциплин, масштабного возрождения производств и глубокой модернизации научно-технической базы. В связи с этим ранняя инженерная подготовка подростков по профильным техническим дисциплинам, дальнейшая профессиональная ориентация в секторы инновационных производств особенно важна.
В настоящее время отрасль беспилотных летательных аппаратов (БПЛА)является относительно новой, но уже стала очень перспективной и быстроразвивающейся. Одно из главных преимуществ БПЛА – исключение человеческого фактора при выполнении поставленной задачи, который особенно сказывается в опасных для жизни человека задачах. Очень скоро БПЛА станут неотъемлемой частью повседневной жизни: мы будем использовать БПЛА не только в СМИ и развлекательной сферах, но и в проведении воздушного мониторинга общественной и промышленной безопасности, участие в поисково-спасательных операциях, метеорологические исследования, разведка, мониторинг сельскохозяйственных угодий, доставка грузов, кинематография, изобразительное искусство, обучение и многое другое. Дополнительное роботизированное навесное оборудование позволяет добиться высокого уровня точности измерений и автоматизации выполнения полетных операций.
Статистика приводит данные – на одного профильного специалиста в БПЛА-строительстве приходится более десяти специалистов в смежных направлениях (химические производства, новые материалы, системы связи и прочее). Таким образом, подготовка специалистов в отрасли БПЛА-строительства является важнейшей задачей не только опережающего технического развития, но и экономической стабильности.
Направленность программы: техническая.
Актуальность дополнительной общеобразовательной общеразвивающей программы «Управление беспилотными летательными аппаратами» в том, что она реализует потребности обучающихся в техническом творчестве, развивает инженерное мышление, соответствует социальному заказу общества в подготовке технически грамотных специалистов.
Актуальность беспилотных технологий и робототехники очевидна – это новое слово в науке и технике, способное преобразить привычный мир уже в ближайшее десятилетие. В настоящее время наблюдается повышенный интерес к беспилотной авиации как инновационному направлению развития современной техники, хотя история развития этого направления началась уже более 100 лет тому назад. Развитие современных и перспективных технологий позволяет сегодня беспилотным летательным аппаратам успешно выполнять такие функции, которые в прошлом были им недоступны или выполнялись другими силами и средствами.
Благодаря увеличению возможностей и повышению доступности дронов, потенциал использования их в разных сферах экономики стремительно растёт. Это создало необходимость в новой профессии: оператор беспилотных авиационных систем (БАС). Именно поэтому важно правильно подготовить и сориентировать будущих специалистов, которым предстоит жить и работать в новую эпоху повсеместного применения беспилотных летательных аппаратов и робототехники.
Настоящая образовательная программа позволяет не только получить ребенку инженерные навыки моделирования, конструирования, программирования и эксплуатации БПЛА, но и подготовить обучающихся к планированию и организации работы над разноуровневыми техническими проектами, а также нацеливает на осознанный выборв дальнейшем вида деятельности в техническом творчестве или профессии: инженер-конструктор, инженер-технолог, проектировщик, программист БПЛА, оператор БПЛА.
Новизна настоящей образовательной программы заключается в том, что она интегрирует в себе достижения современных и инновационных направлений в малой беспилотной авиации. В основе программы - комплексный подход в подготовке обучающихся. Современный оператор беспилотных летательных аппаратов должен владеть профессиональной терминологией, разбираться в сборочных чертежах агрегатов и систем беспилотных летательных аппаратов, иметь навык по пилотированию в любых погодных условиях, сборке и починке БПЛА.
При изготовлении моделей подростки сталкиваются с решением вопросов аэродинамики, информационных технологий, они используют инженерный подход к решению встречающихся проблем.
Педагогическая целесообразность программы в том, что она направлена на развитие в ребенке интереса к проектной, конструкторской и предпринимательской деятельности, значительно расширяющей кругозор и образованность школьника. Содержание программы направлено на профессиональную ориентацию обучающихся и мотивацию для возможного продолжения обучения в объединениях дополнительного образования БПЛА, далее в вузах и последующей работы на предприятиях по специальностям, связанным с робототехникой и авиастроительством.
Отличительной особенностью данной программы в том, что в ходе реализации обучающиеся получают не только технические знания, но и основы профессии, востребованной в современных социально-экономических условиях.
Цель: формирование начальных знаний и инженерных навыков в области проектирования, моделирования, конструирования, программирования и эксплуатации сверхлегких летательных дистанционно пилотируемых летательных аппаратов.
Задачи:
Сформировать знания основ теории полета, практических навыков дистанционного управления квадрокоптером.
Обучить основным приемам сборки, программирования, эксплуатации беспилотных летательных систем.
Сформировать навыки пилотирования БПЛА в режиме авиасимулятора.
Сформировать умения и навыки визуального пилотирования беспилотного летательного аппарата.
Возраст обучающимся: 14-17 лет.
Условия набора детей в коллектив: принимаются все желающие.
Наполняемость в группах составляет – 14 человек.
Формы организации деятельности обучающихся: групповая, индивидуальная, индивидуально-групповая и фронтальная.
Методы обучения: кейс-метод (case-study), «мозговой штурм» (Brainstorming), метод задач (Problem-BasedLearning) и метод проектов, практический.
Формы проведения занятий: теоретическое изложение материала, практическое занятие.
Ожидаемые результаты:
1. У обучающихся будут сформированы умения и навыки дистанционного управления беспилотным летательнымаппаратом.
2. Обучающиесяовладеют основными приемами сборки, программирования, эксплуатации беспилотных летательных систем.
3. Обучающиеся приобретут навыки пилотирования БПЛА в режиме авиасимулятора.
4. Сформировать умения и навыки визуального пилотирования беспилотного летательного аппарата.
Способы определения результативности: педагогическое наблюдение, опрос, практическое задание.
Форма подведения итогов реализации программы:
конкурс;
выполнение практических полётов (визуальных и в режиме авиасимулятора);
практические работы по сборке, программированию и ремонту квадрокоптеров.
2. Учебно-тематический план:
| № п/п | Наименование разделов | Кол-во часов | Оборудование | |||
| Всего | Теория | Практика | ||||
| 1 | Инструктаж по технике безопасности | 1 | 1 |
| Ноутбук | |
| 2 | Планирование проекта. | 2 | 1 | 1 | Ноутбук | |
| 3 | Обучение управлению БПЛА. | 8 | 2 | 6 | Квадрокоптер | |
| 4 | Обучение маневрам | 7 | 1 | 6 | Квадрокоптер | |
| 5 | Проектирование полетов для конкурсе | 2 | 1 | 1 | Листы А4, краски, фломастеры | |
| 6 | Проектирование гоночной трассы. | 3 | 1 | 2 | Ватман, фломастеры | |
| 7 | Тренировка | 6 |
| 6 | Квадрокоптер, подготовленные знаки для трассы | |
| 8 | Конкурс. | 5 |
| 5 | Квадрокоптер, подготовленные знаки для трассы | |
|
| Итого часов | 34 | 7 | 27 |
| |
3. Содержание программы:
Тема 1. Планирование проекта.
Теория.
Инструктаж по технике безопасности. Правила выбора проекта. Введение в беспилотную авиацию, в дроностроение. Описание квадрокоптеров, их применение. Знакомство с симулятором полетов на квадрокоптере.
Практика.
Защита проекта. Проектирование рамы квадрокоптера. Начало работы над сборкой квадрокоптера, сборка рамы квадрокоптера согласно инструкции, пайка деталей. Работа с простым инструментом (отвертка, пассатижи).
Тема 2. Обучение управлению беспилотным летательным аппаратом. Сборка рамы модели.
Теория.
Бесколлекторные двигатели и их регуляторы хода: устройство, принципы их функционирования. Платы разводки питания: общее устройство, характеристики.
Практика.
Пайка двигателей и регуляторов, пайка регуляторов и силовых проводов к платам разводки питания.Работа с простым инструментом (отвертка, пассатижи).
Тема 3. Сборка силовой части.
Теория.
Знакомство с бесколлекторными двигателями, их отличиями от коллекторных двигателей, преимущества. Знакомство со схемой сборки электронных компонентов квадрокоптера. Электронные регуляторы оборотов.
Практика.
Продолжение работы над сборкой квадрокоптера. Пайка и сборка радиотехнической схемы. Установка двигателей, полетного контроллера, платы разводки питания, электронных регуляторов оборотов.
Тема 4. Настройка летного контроллера квадрокоптера.
Теория.
Знакомство с полетным контроллером: устройство полётного контроллера, принципы его функционирования, настройка контроллера с помощью компьютера, знакомство с программным обеспечением для настройки контроллера.
Практика.
Продолжение работы над сборкой квадрокоптера. Пайка и сборка радиотехнической схемы. Установка двигателей, полетного контроллера, платы разводки питания, электронных регуляторов оборотов. Настройка полетного контроллера квадрокоптера. Обучение работе на симуляторе. Тестовые запуски квадрокоптеров. Обучение управлению квадрокоптером. Управление квадрокоптером: «взлёт/посадка», «удержание на заданной высоте», «вперед-назад», «влево-вправо», «точная посадка на удаленную точку»,«коробочка», «челнок», «восьмерка», «змейка», «облет по кругу». Разбор аварийных ситуаций.
Тема 5. Проектирование гоночной трассы.
Теория.
Знакомство с принципами построения трасс.
Практика.
Запуски квадрокоптеров. Настройка ПИДОв и пробные полеты. Продолжение работы в симуляторе по повышению мастерства пилотирования.
Тема 6. Конкурс
Проведение гоночных соревнований среди команд, допущенных к соревнованиям,в полетном симуляторе. Тактическая борьба и полеты в рамках соревнований.
Список литературы:
Белинская Ю.С. Реализация типовых маневров четырехвинтового вертолета. Молодежный научно-технический вестник. МГТУ им. Н.Э. Баумана. Электрон.журн. 2013. №4. Режим доступа: http://sntbul.bmstu.ru/doc/551872.html.
Гурьянов А. Е. Моделирование управления квадрокоптером Инженерный вестник. МГТУ им. Н.Э. Баумана. Электрон.журн. 2014 №8 Режим доступа: http://engbul.bmstu.ru/doc/723331.html.
Как собрать квадрокоптер на Ардуино https://drongeek.ru/profi/kvadrokopter-na-arduino
Ефимов.Е. Программируем квадрокоптерна Arduino: Режимдоступа: http://habrahabr.ru/post/227425/.
Институт транспорта и связи. Основы аэродинамики и динамики полета. Рига, 2010. Режим доступа:
http://www.reaa.ru/yabbfilesB/Attachments/Osnovy_ajerodtnamiki_Riga.pdf.
Канатников А.Н., Крищенко А.П., Ткачев С.Б. Допустимые пространственные траектории беспилотного летательного аппарата в вертикальной плоскости.
Наука и образование. МГТУ им. Н.Э. Баумана. Электрон.журн. 2012. №3. Режим доступа: http://technomag.bmstu.ru/doc/367724.html.
Мартынов А.К. Экспериментальная аэродинамика. М.: Государственное издательствообороннойпромышленности,1950.479с.13.МирошникИ.В.Теория автоматического управления. Линейные системы. СПб: Питер, 2005. 337.
Дополнительная литература
Редакция Tom'sHardwareGuide. FPV- мультикоптеры: обзор технологии и железа. 25 июня 2014. Режим доступа: http://www.thg.ru/consumer/obzor_fpv_multicopterov/print.html
AldereteT.S. “Simulator Aero Model Implementation” NASA Ames Research Center, Moffett Field, California. P. 21. Режим доступа: http://www.aviationsystemsdivision.arc.nasa.gov/publications/hitl/rtsim/Toms.pdf
BouadiH.,Tadjine M. Nonlinear Observer Design and Sliding Mode Control of Four Rotors Helicopter. World Academy of Science, Engineering and Technology, Vol. 25, 2007. Pp. 225-229. 11. MadaniT., BenallegueA. Backstepping control for a quadrotor helicopter. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2006. Pp. 3255-3260.
Dikmen I.C., Arisoy A., TemeltasH. Attitude control of a quadrotor. 4th International Conference on Recent Advances in Space Technologies, 2009. Pp. 722-727. 4. LuukkonenT. Modelling and Control of Quadcopter. School of Science, Espoo, August 22, 2011.P. 26. Режимдоступа:http://sal.aalto.fi/publications/pdf-files/eluu11_public.pdf
LIPOSAFETYANDMANAGEMENT: Режимдоступа: http://aerobot.com.au/support/training/lipo-safety
Murray R.M., Li Z, Sastry S.S. A Mathematical Introduction to Robotic Manipulation. SRC Press, 1994. P. 474.
Zhao W., Hiong Go T. Quadcopter formation flight control combining MPC and robust feedback linearization. Journal of the Franklin Institute. Vol.351, Issue 3, March 2014. Pp. 1335-1355. DOI: 10.1016/j.jfranklin.2013.10.021
Лекции от «Коптер-экспресс» https://youtu.be/GtwG5ajQJvA?t=1344
Регистрация беспилотника
https://tochkarosta.68edu.ru/методические-рекомендации/
Приложение 1
Техника безопасности при работе с электрическим оборудованием
Требования безопасности перед началом работы
Перед началом работы следует убедиться в исправности электропроводки, выключателей, штепсельных розеток, при помощи которых оборудование включается в сеть, наличии заземления компьютера, его работоспособности,
Требования безопасности во время работы
Во избежание повреждения изоляции проводов и возникновения коротких замыканий не разрешается: вешать что-либо на провода, закрашивать и белить шнуры и провода, закладывать провода и шнуры за газовые и водопроводные трубы, за батареи отопительной системы, выдергивать штепсельную вилку из розетки за шнур, усилие должно быть приложено к корпусу вилки.
Для исключения поражения электрическим током запрещается: часто включать и выключать компьютер без необходимости, прикасаться к экрану и к тыльной стороне блоков компьютера, работать на средствах вычислительной техники и периферийном оборудовании мокрыми руками, работать на средствах вычислительной техники и периферийном оборудовании, имеющих нарушения целостности корпуса, нарушения изоляции проводов, неисправную индикацию включения питания, с признаками электрического напряжения на корпусе, класть на средства вычислительной техники и периферийном оборудовании посторонние предметы.
Запрещается под напряжением очищать от пыли и загрязнения электроооборудование.
Требования безопасности в аварийных ситуациях
При обнаружении неисправности немедленно обесточить электрооборудование, оповестить педагога. Продолжение работы возможно только после устранения неисправности.
Во всех случаях поражения человека электрическим током немедленно вызывают врача. До прибытия врача нужно, не теряя времени, приступить к оказанию первой помощи пострадавшему.
Необходимо немедленно начать производить искусственное дыхание, а также наружный массаж сердца.
Искусственное дыхание пораженному электрическим током производится вплоть до прибытия врача.
На рабочем месте запрещается иметь огнеопасные вещества
Приложение 2
Техника безопасности при работе
с беспилотными летательными аппаратами
Дроны и квадрокоптеры стали неотъемлемой частью нашей жизни во всем мире, как смартфон. Развитие технологий и снижение стоимости беспилотных летательных аппаратов способствует этому. Поэтому, остро встает вопрос о повышения навыка пользования дронами и квадрокоптерами. И здесь можно говорить о двух важных составляющих этой безопасности - безопасное пилотирование дрона и умелое обращение с самим летательным аппаратом. Сочетание этих двух навыков и гарантирует безопасность полетов на дронах и квадрокоптерах.
1) Основное правило безопасности.
Первое и самое важное - безопасность людей. Соблюдение элементарных правил техники безопасности. Не стоит браться за управление летательным аппаратом пока вы не чувствуете уверенность в своих навыках. Последствия халатного отношения к данному правилу может привести к возникновению опасной ситуации для того кто управляет аппаратом или для окружающих. Очень рекомендуем первые полеты проводить с инструктором, на открытом пространстве и на небольшой высоте и удалении.
2) Сбои могут возникнуть из-за ошибки пилота, аппаратного или программного сбоя.
а) У вас должно быть достаточно силы тяги.
б) Если вы не справляетесь с управлением, автопилот может потребовать больше тяги, чем доступно иначе это приведёт к потере стабилизации полета.
в) В идеале мультикоптер должен взлетать при 50% стика газа.
3) Во время обучения полетами не рекомендуется использовать дорогостоящих, жестких, острых карбоновых деталей (пропеллеров и рамы).
а) Это будет более дешевый, мягкий, хрупкий пластиковый пропеллер и рама.
б) Карбон и стекловолокно не поддаются разрушению, это может быть небезопасно при контакте с чем-либо.
4) Если вы летаете рядом с людьми - вы их ставите под угрозу.
а) Будьте уверены, что есть безопасное расстояние между вами и зрителями.
б) Вам нужно понимать что для вас является безопасное расстояние для вас и окружающих.
в) По крайней мере это не ближе 3 метра , но не дальше 10м.
г) Держите всех людей дальше от летательного аппарата
д) Убедитесь, что никто не находиться между вами и аппаратом
е) Зрители должны быть позади пилота
ж) Если кто-то нарушает безопасную зона полета - сажайте летательный аппарат и ждите пока не освободиться пространство для безопасного полета.
з) При полном газе средниймультикоптер может развить скорость в 32км/ч, может подняться на сотни метров и улететь на далекие расстояния.
5) Всегда будьте уверены, что кабель батареи не подключен к основной плате, пока вы не готовы к полету.
а) Всегда включайте передатчик и убеждайтесь, что ручка газа находиться в нулевом положении
б) После приземления первое, что вы должны сделать - это отключить питание!
в) Не выключайте передатчик, пока вы не обесточили аппарат.
г) Всегда снимайте пропеллеры если вы тестируете или настраиваете аппарат.друзья и ваше лицо будут вам благодарны
д) Когда батарея подключена, всегда опасайтесь того, что двигатели вооружены, проверяйте это быстрой подачей газа.
е) Не подбирайте аппарат и не берите в руки аппаратуру во избежание случайного поданного газа.
ж) Не пытайтесь летать больше, чем позволяют ваши батареи, сохраняйте для безопасности мощность, иначе это может привести к аварии и нехватке мощности на вираже.
6) В APM полетном контроллере используется функция постановки на охрану (arming)
а) Перед полетом после того, как вы подключили батарею на аппаратуре, ручка газа должна быть нажата вниз и вправо на несколько секунд, что бы снять с охраны двигатели.
б) После посадки ваше первое действие должно быть постановка на охрану - ручка газа вниз и влево в течении нескольких секунд. После этого можно проверить постановку на охрану путем небольшого перемещение ручки газа вверх и сразу же вниз.
в) Когда вы поставили двигатели на охрану (disarming) ручку газа все равно требуется держать в нуле.
7) Учитесь переключать режимы из стабилизации в другие и обратно.
а) Это самая хорошая практика.
б) В режим стабилизации может быть добавлен Simplemode, для лучшей практики, если вы испытываете трудности.
в) Не используйте другие режимы, кроме Стабилизации (Stabilize) и SimpleStabilize пока вы не научились в них достаточно хорошо летать.
8) Важно помнить, что при первой аварии, неправильной посадке или неизвестного вам состояния полетного контроллера необходимо:
а) бросить полотенце на пропеллеры, так как они могут начать крутиться неожиданно;
б) сразу отключайте аккумулятор;
в) большое полотенце важная часть для обеспечения безопасности с огнетушителем и аптечкой;
г) лучше использовать первое средство, чем сразу последнее.
9) При тестировании или полетах по любым точками в режиме навигации используя GPS.
а) Убедитесь, что ваш GPS смог поймать необходимое количество спутников и перейти в состояние LOCK (3d fix) перед снятием охраны (arming) и взлётом.
б) Убедитесь, что ваша домашняя точка в ПО MissionPlanner установлена правильно.
в) Если GPS не смог корректно установить домашнюю точку, перезагрузитесь и подождите когда будет поймано более 8 спутников и проверьте домашнюю точку снова.
10) Знайте законы
а) Наш личный опыт использования мультикоптеров является постоянно под атакой тех, кто боится “дронов” и вторжение в их частную личную жизнь. Если вы нарушаете закон, или вторгаетесь в чью-то личную жизнь - готовьтесь отвечать по закону. Пожалуйста, понимайте наши законы и летайте, не нарушая их.
б) Найдите ближайшую любительскую группу людей, которые занимаются полетами и поинтересуйтесь у них о законности полетов в разных местах. Они с радостью смогут вам показать специальные отведенные места, которые не нарушают чьи-то правда, где вы можете обмениваться опытом и получать удовольствие от полетов.
Самое главное: соблюдайте безопасную дистанцию между вашим аппаратом и людьми.
Приложение 3
Конкурсное задание по компетенции «Управление беспилотными летательными аппаратами».
Задание 1. Выполнить тест на знание строения квадрокоптеров, их классификацию, порядок сборки.
Время выполнения задания – 30 минут.
Задание 2. Пилотирование квадрокоптера на симуляторе.
Выполнить пилотирование квадрокоптера на симуляторе. Общее время выполнения заданияна компетенции – 1 час.
Команда выполняет задание на симуляторе за 2 минуты. Участникам необходимо пройти трассу, пролетая сквозь ворота ограниченного размера. За каждый пролет через ворота начисляется 1 очко. За пролет сквозь двойные ворота начисляется 2 очка. Цель участников набрать максимальное кол-во баллов за 2 минуты полетного времени. Количество баллов неограниченно.
Задание 3. Пилотирование беспилотными летательными аппаратами.
Время выполнения задания – 2,5 часа, из которых 1 час отводятся на тренировочные полеты в порядке очередности участников по одной попытке в один подход, но не более 5 минут, и 0,5 часа непосредственно на соревнования по точности и времени прохождения трассы.
«Практический» этап соревнований. Участникам команд необходимо показать мастерство пилотирования квадрокоптером.
Цель этого этапа: за меньшее количество времени пройти трассу с установленными препятствиями. Команде дается 2 попытки на прохождение трассы, в зачет идет лучшее (наименьшее) время.
Командам начисляются баллы за прохождение трассы.
Последняя команда получает 5 баллов
Каждая последующая получает на 15 баллов больше.
Штрафные баллы:
- 5 баллов - касание земли или препятствия(стойки)
- 10 баллов - падение квадрокоптера.
Дополнительные баллы:
- аккуратность полета, отсутствие столкновений, повреждений аппарата -15 баллов
- точное приземление на финишную площадку -10 баллов
- соответствие полета заданной траектории -10 баллов
Итоговое количество баллов складывается из баллов за прохождение трассы и штрафных баллов. Максимальное количество баллов -100.
ИТОГИ СОРЕВНОВАНИЙ
Победу в соревнованиях одержит команда набравшая наибольшее количество баллов по итогам 3 этапов.
Приложение 4
Тестовое задание
ТЕСТ ПО ПРОГРАММЕ
«БЕСПИЛОТНЫЕ ЛЕТАТЕЛЬНЫЕ АППАРАТЫ»
1.Что такое Квадрокоптер?
1) это беспилотный летательный аппарат
2) обычно управляется пультом дистанционного управления с земли
3) имеет один мотор с двумя пропеллерами
4) имеет четыре мотора (или меньше) с четырьмя пропеллерами

2. В Российском законодательстве установлена максимальная масса квадрокоптера не требующего специального разрешения на полеты:
1) до 250 грамм 2) до 500 грамм
3) до 1000 грамм 4) _____________
3. На картинке представлен квадрокоптер и схематично показано направление вращения винтов. Укажи верное направление движения «вперед» квадрокоптера:
1) 1 2) 2 3) 3
4. Что такое электронный регулятор оборотов?
1) устройство для управления оборотами электродвигателя, применяемое на радиоуправляемых моделях с электрической силовой установкой
2) устройство для управления оборотов резиномоторного двигателя
3) устройство для управления оборотами сервомашинки
5. Kv-rating показывает:
1) сколько оборотов совершит двигатель за одну минуту (RPM) при определенном напряжении
2) емкость батареи питания квадрокоптера
3) скорость движения квадрокоптера по прямой
6. Расшифруй надпись: Turnigy Multistar 5130-350
1) это двигатель с высотой 51мм, диаметром статора 30 мм и KV 350
2) это двигатель с диаметром статора 51 мм, высотой 30 мм и KV 350
3) это двигатель с диаметром ротора 51 мм, высотой 30 мм и KV 350
7. Расшифруй надпись: Scorpion M-2205-2350KV
1) это двигатель с диаметром статора22 мм, высотой 5 мм и KV 2350
2) это двигатель с диаметром ротора 22 мм, высотой 5 мм и KV 2350
3) это двигатель с высотой 22мм, диаметром статора 5 мм и KV 2350
8. Чем лучше использование бесколлекторного двигателя?
1) лучшее соотношение масса/мощность, лучшее КПД
2) легче 3) компактнее
4) меньше греются 5) практически не создают помех
9. Параметр указывающий, на сколько поднялся бы пропеллер за один оборот вокруг своей оси с данным наклоном лопасти, если бы он двигался в плотном веществе, называется:
1) Scrutch 2) Pitch 3) Patch
10. Расшифруй цифровое обозначение пропеллера размером 10х4,5:
1) Первая цифра в маркировке обозначает шаг винта в дюймах, а вторая – диаметр винта
2) Первая цифра в маркировке обозначает диаметр винта в дюймах, а вторая – диаметр отверстия под ось мотора
3) Первая цифра в маркировке обозначает диаметр винта в дюймах, а вторая – шаг винта
11. Посмотри на рисунок и укажи, каким словом отмечен тангаж:
1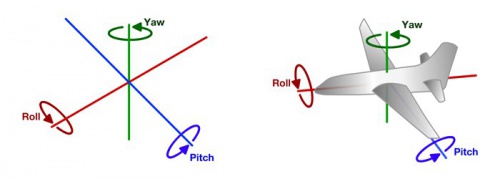 ) Roll
) Roll
2) Pitch
3) Yaw
12. Посмотри на рисунок и укажи, каким словом отмечен крен:
1) Roll 2) Pitch 3) Yaw
13. Посмотри на рисунок и укажи, каким словом обозначается рыскание:
1) Roll 2) Pitch 3) Yaw
14. Как расшифровывается аббревиатура FPV?
1) носимая камера 2) полеты без управления 3) вид от первого лица
15. Полётный контроллер – это:
1) электронное устройство, управляющее положением камеры для записи видео
2) электронное устройство, управляющее полётом летательного аппарата.
3) электронное устройство для связи через спутник
16. Что такое процедуры ARM и DISARM? Как они выполняются?
ARM – это _______________________________________________
DISARM - это _____________________________________________
17. Что делать если квадрокоптер ударился о землю и потерял управление?
1) _______________________________________
2) _______________________________________
3) _______________________________________
4) _______________________________________
5) _______________________________________
18. Что обязательно нужно проверить ПЕРЕД вылетом?
1) Затянутость гаек пропеллеров и отсутствие болтающихся проводов
2) Заряд аккумуляторов и правильность установки пропеллеров
3) Крепление и целостность защит пропеллеров
19. Что НЕЛЬЗЯ делать во время полета?
1) Стоять сбоку от зоны полётов
2) Двигать стиками в крайние положения
3) Медленно летать
4) Летать выше собственного роста
20. Что делать сразу после приземления?
1) Сфотографировать на телефон
2) Выключить пульт
3) Подойти к коптеру и отключить его LiPo аккумулятор
4) Disarm и проверить газ
Приложение 5
Оборудование площадки для соревнований
Трасса для соревнований должна иметь длину от 90 до 200 метров по средней линии без учета стартовой и финишной площадок. Ширина трассы не должна превышать 5 метров.
Площадка соревнований должна быть ограждена сеткой по периметру трассы.
Допускается состязание в пилотировании БЛА между двумя участниками одновременно на усмотрение жюри с использованием двух стартовых и финишных площадок для зрелищности проведения соревнований.
Обязательные элементы трассы
Стартовая, она же финишная площадка (не менее 2-х штук) представляет собой твердую и легко переносимую площадку яркого цвета, либо имеющую возможность надежной фиксации в месте старта. Размер Стартовой площадки – 1500х1000 мм.
Курсовые ворота (не менее 2-х штук) изготавливаются из синтетических материалов и имеют сборную конструкцию. Основа ворот может состоять из вспененного полиуретана, установленного один в другой или металлического либо пластикового каркаса. Основание ворот изготавливается из жестких пластиковых труб или металлических оковок, позволяющих установить их на фиксаторы и обеспечить надежное сцепление с поверхностью земли. Ворота должны иметь яркий чехол или основу, изготовленных из синтетических или натуральных тканей, позволяющий легко их снять с мягкого основания или каркаса, и осуществлять уход за чехлом. Габаритные размеры ворот (по внешней стороне): шириной не менее 2500 мм и высотой на 1450 мм. Форма ворот свободная, но в рамках габаритных размеров.
Поворотные столбы (не менее 3-х штук) изготавливаются из синтетических материалов и имеют сборную конструкцию. Основа столбов состоит из вспененного полиуретана, установленного один в другой. Основание столба изготавливается из жестких пластиковых труб, позволяющих установить их на фиксаторы и обеспечить надежное сцепление с поверхностью земли. Столбы имеют яркий чехол, изготовленный из синтетических или натуральных тканей, позволяющий легко снять его с мягкого основания и осуществлять уход за чехлом. Габаритные размеры столба: шириной не менее 500 мм и высотой на 2300 мм.
Указатели направления трассы имеют белый цвет основного поля и стрелки оранжевого цвета, указывающие направление движения или поворота. Размер указателей не менее 297х420мм. На трассе должно быть размещено не менее 8 указателей.
4.1. Допускается добавление элементов трассы членами жюри для усложнения конкурсного задания.
4.2. Данный модуль проводится на открытой ровной площадке площадью не менее 1000 кв. м.
Приложение 6
Ориентировочная схема трассы для пилотирования
Приложение 7
Критерии оценивания
| Наименование критерия оценки | Наименование аспекта оценки | Максимальный балл |
| Модуль А «Тестирование» макс – 100 б | Правильный ответ на каждый вопрос
| 5
|
| Модуль В «Пилотирование БПЛА в режиме авиасимулятора» макс –200 баллов | каждый пролет через ворота | 1 |
| каждый пролет через двойные ворота
| 2
| |
| Модуль С «Визуальное пилотирование беспилотного летательного аппарата»
макс – 100 б | Прохождение трассы за наименьшее время: 1 место 2 место 3 место 4 место 5 место
| 65 50 35 20 5
|
| Дополнительные баллы: аккуратность полета, отсутствие столкновений, повреждений аппарата | 15
| |
| - точное приземление на финишную площадку | 10
| |
| соответствие полета заданной траектории | 10
| |
| Штрафные очки: |
| |
| касание земли или препятствия(стойки) | 5
| |
| каждое падение квадрокоптера.
| 10
|
Примечание: полный список критериев оценки конкурсного задания до сведения участников не доводится.
Приложение 8
22












Вебинар для учителей
Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ