, Алчевск


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 27.04.2024 20:02

Шишкина Людмила Николаевна
Преподаватель спецпредметов
64 года
Местоположение
Специализация
Презентация на тему: "Развитие автоматизации производства с середины 50-х гг. ХХ в. по наше время"
Категория:
Технология
26.02.2019 06:35

Просмотр содержимого документа
«Презентация на тему: "Развитие автоматизации производства с середины 50-х гг. ХХ в. по наше время"»
ОБОСОБЛЕННОЕ СТРУКТУРНОЕ ПОДРАЗДЕЛЕНИЕ «АЛЧЕВСКИЙ СТРОИТЕЛЬНЫЙ КОЛЛЕДЖ» ГОСУДАРСТВЕННОГО ОБРАЗОВАТЕЛЬНОГО УЧРЕЖДЕНИЯ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ ЛУГАНСКОЙ НАРОДНОЙ РЕСПУБЛИКИ «ДОНБАССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Развитие автоматизации
производства с середины 50-х гг.
ХХ в. по наше время
Выполнил: студент гр.43 Дранов А. С.
Преподаватель: Шишкина Л. Н.

1950-е гг. Повсеместное распространение автоматизации производства
- Практически 50-е годы явились периодом, когда автоматизация производства начала внедряться во все имеющие значительный удельный вес отрасли народного хозяйства СССР.
- В машиностроении — производстве тракторов, автомобилей и сельскохозяйственных машин — были пущены автоматические линии; начал работать автоматизированный завод по производству поршней для автомобильных двигателей.
- Закончен перевод на автоматическое управление агрегатов ГЭС, многие из них были полностью автоматизированы.
- На ряде крупнейших ТЭЦ были автоматизированы котельные цехи.
- В металлургической промышленности около 95 % чугуна и 90 % стали выплавлялось в автоматизированных печах; были введены в эксплуатацию первые автоматизированные прокатные станы.
- Пущены автоматические установки на нефтеперерабатывающих предприятиях.
- Осуществлено телемеханическое управление газопроводами.
- Автоматизированы многие системы водоснабжения.
- Начали действовать автоматические бетонные заводы.
- Лёгкая и пищевая промышленность стала широко оснащаться автоматами и полуавтоматами для расфасовки, дозировки и упаковки продукции и автоматическими линиями по производству продуктов.
- Парк автоматизированного оборудования в 1953 году вырос в 10 раз (по сравнению с 1940 годом).
- В металлообрабатывающей промышленности появились станки с программным управлением.
- Для производства массовой продукции были применены роторные автоматические линии.
- Во взрывоопасных химических производствах получило широкое распространение телемеханическое управление процессами.

Автоматизированная поточная линия на производстве автомобилей
1960-е – 1970-е гг. Первые промышленные роботы. Промышленные роботы первого поколения
В 1962 г. в США были созданы первые промышленные роботы и произведены они были компаниями «Юнимейшн Инкорпорэйтед» и «Версатран». Хотя, если быть точными, то раньше все-таки выпустили промышленного робота «Юнимейт», созданного Д. Деволом, запатентовавшим собственную САУ, программируемую с помощью перфокарт. Это был очевидный технический прорыв: робот запоминал координаты точек своего маршрута и выполнял работу согласно программе.
Первый промышленный робот «Юнимейт» был оснащен двухпальцевым устройством для захвата на пневмоприводе и «рукой» на гидроприводе с пятью степенями свободы. Его характеристики позволяли перемещать 12-килограммовую деталь с точностью до 1,25 мм. «Юнимейт» работал с производительностью 135 деталей в час при браке 2 %, тогда как производительность ручной разгрузки составляла 108 деталей в час при браке до 20 %.
Нужно отметить, что устройство промышленных роботов первого поколения в стоимостном выражении предполагало 75% механики и 25% электроники. Переналадка таких приборов требовала времени и обуславливала простои оборудования. Для перепрофилирования их с целью выполнения новой работы производилась замена программы управления.

Джордж Девол – один из первых изобретателей промышленного робота
Тестирование первого промышленного робота
Первый промышленный робот, собранный фирмой «Unimate»
1970-е гг. – наши дни. Промышленные роботы второго поколения
- Предполагает адаптивное управление роботами, при котором робот получает информацию о внешней среде и, сообразуясь с ней, выбирает оптимальный вариант действий. Например, обретение навыков, позволяющих взять деталь и обойти с ней препятствие.
- В 1974 году фирма «Цинциннати Милакрон» впервые применила в системе управления роботом компьютер, создав промышленный робот T 3 .
Предлагаются необычные кинематические схемы манипуляторов. Быстро развиваются технологические роботы, выполняющие такие операции, как высокоскоростные резание, окраска, сварка. Появление в 1970-х годах микропроцессорных систем управления и замена специализированных устройств управления на программируемые контроллеры позволили снизить стоимость роботов в три раза, сделав рентабельным их массовое внедрение в промышленности. Этому способствовали объективные предпосылки развития промышленного производства.
Виды основных производственных операций (сварка, покраска, сборка, различного рода механическая обработка) также подлежат адаптации. То есть при выполнении каждой из них инициируется многовариантность для улучшения качества любого вида вышеперечисленных работ. Управление промышленными манипуляторами в основном осуществляется программно. Решение о выборе типа работы программы принимается роботом на основании информации о среде, полученной с датчиков. Характерной чертой функционирования робота второго поколения является предварительное наличие установленных режимов работы, каждый из которых активируется при определенных показателях, полученных из внешней среды .
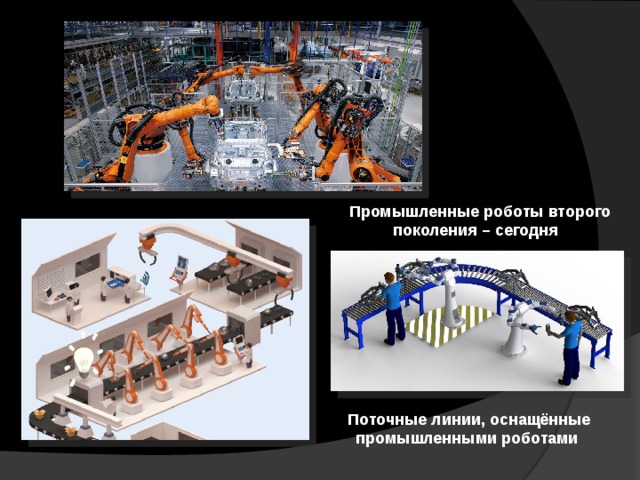
Промышленные роботы второго поколения – сегодня
Поточные линии, оснащённые промышленными роботами
Дальнейшие перспективы Промышленные роботы третьего поколения
Автоматы-роботы третьего поколения способны самостоятельно генерировать программу своих действий в зависимости от поставленной задачи и обстоятельств внешней среды. У них нет расписанных технологичных действий при определенных вариантах внешней среды. Они обладают умением самостоятельно оптимально выстраивать алгоритм своей работы, а также оперативно реализовывать его практически.
Стоимость электроники такого промышленного робота в десятки раз выше его механической части. Новейший робот, осуществляя захват детали благодаря сенсорам, «знает», насколько удачно он это сделал. Кроме того, регулируется сама сила захвата (обратная связь по усилию) в зависимости от хрупкости материала детали. Возможно, именно поэтому устройство промышленных роботов нового поколения называют интеллектуальным. Система управления такими роботами использует методы искусственного интеллекта.
Самое интересное впереди…

Развитие промышленной роботехники привело к появлению промышленных роботов с лицами
Образ роботизированной поточной линии будущего
Спасибо за внимание!














Вебинар для учителей
Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ