Россия, Каменск-Шахтинский


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 18.04.2024 21:15
Барышев Евгений Валентинович
педагог дополнительного образования
59 лет
Местоположение
Специализация
«Манипулятор на гусеничном шасси»
Категория:
Прочее
02.08.2021 15:15

Просмотр содержимого документа
««Манипулятор на гусеничном шасси»»
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«Московский государственный технологический университет
«СТАНКИН»
Номинация: «Промышленные технологии и робототехника»
«Манипулятор на гусеничном шасси»
Место выполнения: муниципальное бюджетное учреждение дополнительного образования «Станция юных техников»
города Каменск-Шахтинский, Ростовской области
Автор проекта:
обучающийся объединения
«Робототехника»
учащийся 10 класса,
Дерябкин Сергей Вячеславович
Руководитель проекта:
Барышев Евгений Валентинович
педагог дополнительного образования
МБУ ДО «СЮТ»
2021 год
Оглавление
|
| Аннотация | 3 |
|
| Введение | 4 |
| 1. | Исследование и анализ | 5 |
| 2. | Принцип работы модели | 10 |
| 3. | Этапы изготовления модели | 11 |
|
| Материалы и инструменты | 11 |
|
| Механическая начинка модели | 11 |
|
| Электронная начинка модели | 13 |
| 4. | Заключение | 15 |
| 5. | Библиографический список | 16 |
| 6. | Приложения | 17 |
Аннотация
Объём проектной работы составляет 20 страницы, на которых размещены 20 рисунков. Для сбора и анализа информации существующей гусеничной манипуляторной техники использовали 11 источников.
В проектную работу входит: введение, три главы, два вывода по написанным главам, список используемой литературы и интернет ресурсов, итоговое заключение и приложение.
Во введении раскрывается актуальность исследования по выбранному направлению, ставится проблема, цель и задачи исследования, определяется объект и предмет научных поисков.
В первой главе исследуется и анализируется существующая спасательная техника, формируются выводы по дальнейшей работе над проектом.
Во второй главе описывается принцип работы будущей модели манипулятора на гусеничном шасси.
В третьей главе осуществляется опытно-практическая работа, выбирается материал для изготовления, выполняются чертежи в компьютерных программах, описывается изготовление механической и электронной частей модели.
Заключение посвящено основным выводам и предложениям, полученные при испытаниях модели.
В приложении находятся фотография и чертежи модели манипулятора на гусеничном шасси.
Введение
Манипулятор (грузоподъёмное устройство) - многозвенный механизм с приводами в каждом суставе. Применяется для подъёма и переноса тяжеловесных грузов. Является сбалансированным манипулятором - груз в грузозахватном устройстве удерживается в любом положении неподвижно. Оператор управляет манипулятором, находясь в кабине, либо с помощью дистанционного управления.
Грузовой автомобиль, оснащённый краном-манипулятором, заменяет собой грузовой автомобиль и автокран, что позволяет осуществлять перемещение, загрузку и перевозку тяжёлых грузов более экономно. Бывают ситуации, где автокран не справляется со своей задачей из-за своих габаритов.
Обычно краном-манипулятором управляет человек, находясь непосредственно в кабине крана [6, 280].
Целью данного проекта является создание манипулятора на гусеничном шасси, для работы в опасной среде для человека.
Задачи проекта:
- рассмотреть виды и разновидности манипуляторной техники, технические характеристики;
- определить способы управления движением и манипулятором;
– разработать чертежи корпуса и механизмов, схемы электроники для модели.
При всем при этом стоит учитывать безопасность и экологическую составляющую.
Для выполнения поставленной цели и задач проекта необходимо изучить виды и разновидности различных манипуляторных систем, техническую литературу, способы управления.
1. Исследование и анализ
Манипулятор это трехмерная машина, имеющая три измерения, соответствующие пространству живого существа. В широком понимании манипулятор может быть определен как техническая система, способная замещать человека или помогать ему в выполнении различных задач.
Промышленный манипулятор - предназначенный для выполнения двигательных и управляющих функций в производственном процессе, т. е. автоматическое устройство, состоящее из манипулятора и перепрограммируемого устройства управления, которое формирует управляющие воздействия, задающие требуемые движения исполнительных органов манипулятора (рисунок 1). Применяется для перемещения предметов производства и выполнения различных технологических операций [8].
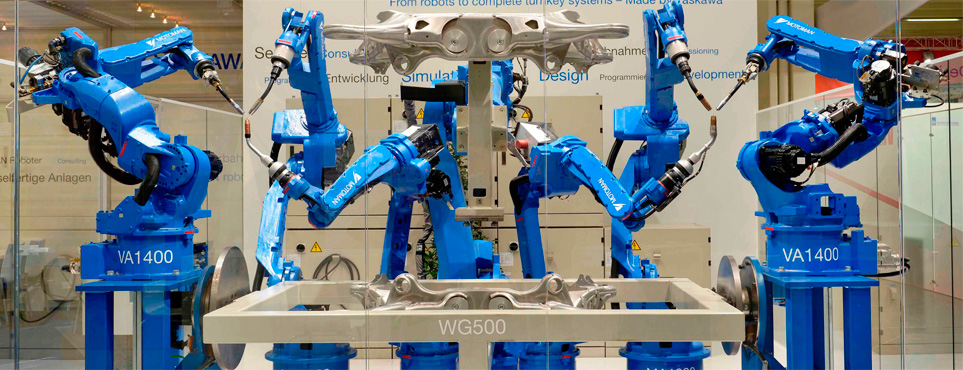
Рисунок 1. Промышленный манипулятор.
Одним из интересных видов спецтехники, в настоящий момент наиболее широко применяемым именно в Японии является гусеничный кран-манипулятор. Даже в странах Европы, где крановые манипуляторы на бортовых автомобилях также распространены, как и в Японии, этот вид грузоподъемной техники не столь развит, как в стране восходящего солнца!
Обычно гусеничная спецтехника предназначена для применения в условиях бездорожья, сложного рельефа (крутых склонов) и т.д. Крановые установки на гусеничном ходу также создаются для эксплуатации в подобных условиях (рисунок 2). Но таких моделей производится не очень много и основное назначение крановых гидроманипуляторов на гусеничном ходу несколько иное. В качестве синонима для гусеничных кранов-манипуляторов часто используют название «краны-пауки». Эти крановые установки способны работать в самых сложных ситуациях, а если учесть возможность дистанционного управления, которая усиленно развивается в Японии.

Рисунок 2. Крановая установка на гусеничном ходу.
Это новая модель гусеничного трактора ТСН-4, оборудованного крано-манипуляторной установкой (рисунок 3). Обширные возможности крана-манипулятора дополняются высокой степенью проходимости и устойчивости гусеничного шасси ТСН-4. Такое совмещение функций очень эффективно отражается на различных строительных и монтажных работах в условиях бездорожья, где автомобильные шасси не имеют возможности проехать [7].

Рисунок 3. Крано - манипуляторная установка на базе трактора ТСН-4.
Тросовый КМУ HKTC HLC-7016L, производства Южная Корея, имеет превосходные характеристики: максимальный вылет стрелы — 19,6 м, на котором поднимает — 370 кг (рисунок 4). При этом его максимальная грузоподъемность равна — 7000 кг, на вылете стрелы — 2,0 м. Вес самого манипулятора составляет всего — 3210 кг. На КМУ установлены поворотные опоры, шириной — 5,5 м, а на самом вездеходе установлены дополнительные опоры. Все опоры манипулятора, в транспортном положении, развернуты вверх. Кран имеет 6 гидравлические выдвижные секции стрелы. Управление КМУ осуществляется с верхнего сиденья и с пульта дистанционного управления. КМУ оснащен люлькой оператора для проведения высотных работ [7].

Рисунок 4. Тросовый КМУ HKTC HLC-7016L.
Компания Maeda Seisakusho Co. Ltd известна своими кранами-манипуляторами, некоторые из них представлены и в нашем ассортименте (MAEDA MC 28 , MAEDA MC373H и др). Но эта компания является крупнейшим производителем гусеничных кранов-манипуляторов. Краны-пауки Maeda работают как от двигателя внутреннего сгорания, так и от электродвигателя (рисунок 5). Наиболее миниатюрные модели могут проехать через дверной проем шириной 56 см. Известно, что краны-манипуляторы на автомобильном шасси великолепно справляются с различными монтажными работами, например, остеклением. Но у крановых манипуляторов есть ограничение по высоте здания! А вот мини-кран «паук» может быть доставлен на любую высоту, где он будет работать уже на собственном ходу [8].

Рисунок 5. Кран - паук Maeda.
Вывод:
Для выполнения цели проекта и наглядной демонстрации работы дистанционного управления манипулятором было принято решение создать модель манипулятора на гусеничном шасси. Человек будет выполнять не роль водителя крано-манипуляторной установки, как в настоящее время, а роль оператора удаленного управления, и управлять с помощью гироскопа движением шасси, а пантографом управлять манипулятором по радиоканалу [2, 43].
В качестве «мозга» выберем контроллер ATmega328Р, он сочетает в себе функциональность, компактность и сравнительно не высокую цену [3, 128].
Изготовим плату расширения для подключения сервомеханизмов [1, 28].
Для передачи команд по радиоканалу выбрали беспроводной модуль NRF24L01 2,4 ГГц. С помощью этого модуля можно передавать по 120 каналам более 100 команд [9].
Механическую часть манипулятора построим на заводских редукторах TT130, движение и разворот, а на сервомеханизмах SG955 подъем и опускание стрелы. Для управления сменным оборудованием (захват, крюк, вилы) применим сервопривод SG90 [11].
В качестве драйвера для ходовых двигателей применим заводскую плату [10].
2. Принцип работы модели
Манипулятор на гусеничном шасси может работать на всех промышленных предприятиях, где требуется работа в опасных для человека условиях, так как оператор находиться далеко от места работы.
Передвигается манипулятор на гусеницах, и управляется оператором дистанционно, с помощью пульта и движения руки, может работать на расстоянии до 1000 метров от центра управления.
Оператор надевает перчатку на кисть с датчиком положения (гироскоп) и закрепляет с помощью липучки на запястье пульт управления стрелой и захватом. При наклоне кисти руки вперед шасси двигается вперед. При наклоне кисти вправо, шасси поворачивает вправо. Таким образом, оператор перемещает шасси в любую сторону. При вращении ручек переменных резисторов на пульте (пропорциональное управление), оператор управляет стрелой и захватом манипулятора [5, 297].
На манипуляторе возможна установка видеокамеры, которая будет позволять оператору осматривать окрестности, вычислять положение манипулятора относительно препятствий.
3. Этапы изготовления модели
Материалы и инструменты
Фотография модели манипулятора на гусеничном шасси находится в приложении, рисунок 12.
Для изготовления модели применялся следующий инструмент и материал:
3D принтер.
Компьютер.
Контроллер марки ATmega328P – 2 шт.
Оцинкованная жесть толщиной 0,4мм, размером 210 х 300мм.
Пластмасса толщиной 3мм, размером 240 х 140мм.
4 колеса, диаметром 50мм, шириной 30мм.
8 колес, диаметром 35мм. шириной 30мм.
4 сервомеханизма.
Редукторы заводского производства - 2шт.
Гайки М 3 - 12 шт.
Болты диаметром 3мм, длина 8мм - 12шт.
Проволока диаметром 2мм, длиной 400мм.
Провода монтажные сечением 0,5мм2, длиной примерно 350см.
Припой ПОС-60 с канифолью диаметром 3мм, длиной 100см.
Паяльная кислота 3мл.
Паяльник 100Вт и 40Вт 220в.
Набор слесарного и монтажного инструмента.
Резбонарезной инструмент М3 и М4 (плашка и метчик).
Механическая начинка модели
При разработке чертежей робота учитывались легкодоступные и дешевые материалы. Модель разрабатывалась на гусеничном шасси [7]. Корпус модели изготовлен из листовой жести с помощью пайки. Шасси построено по танковой схеме. Такой способ передвижения имеет преимущество, разворачивается практически на месте.
Детали манипулятора, траки гусениц и колеса смоделированы в программе Autodesk 3ds Max и распечатаны на 3D принтере.
Вся ходовая часть робота крепятся к металлическому корпусу (рисунок 6), на нижней части располагается плата с контроллером и драйвер для ходовых двигателей. На верхней части установлен отсек для аккумуляторов и беспроводной модуль радиоканала.

Рисунок 6. Рама шасси манипулятора.
Для захвата и поворота кисти использовали сервоприводы MG-90S, а для поднятия стрелы с грузом использовали сервоприводы MG-995. Это цифровые сервоприводы с металлическими шестеренками и шарикоподшипником на выходном валу, они обеспечивают усилие 1,8кг/см и точную отработку позиции (рисунок 7). Весит один сервопривод 13.4 грамма при размерах 22,8 х 12,2 х 28,5мм, напряжение питания от 5,0 вольт.


Рисунок 7. Сервопривод MG-995 и MG90S.
Чертежи рамы манипулятора, 3D детали стрелы и основания находятся в приложении (рисунки 13 - 20).
Электронная начинка модели
Основной блок управления моделью построен на контроллере марки ATmega328P. В передатчике к нему подключены гироскоп и переменные резисторы для управления сервомеханизмами стрелы, модуль NRF-24L (рисунок 8). В приемнике к контроллеру ATmega328Р подключены: модуль NRF-24L, драйвер ходовых двигателей, плата расширения для сервомеханизмов стрелы (рисунок 9).
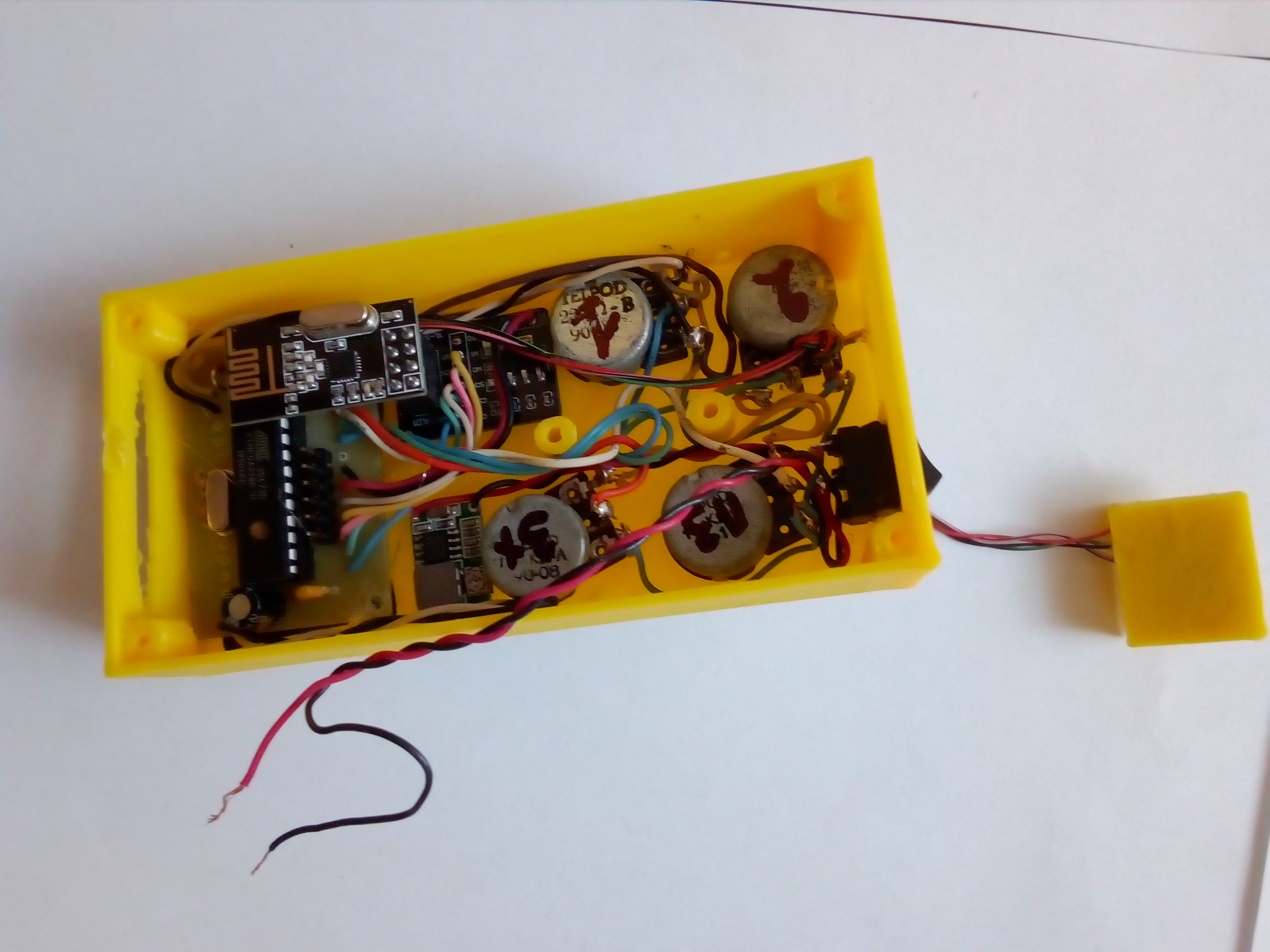
Рисунок 8. Платы контроллера пульта управления.
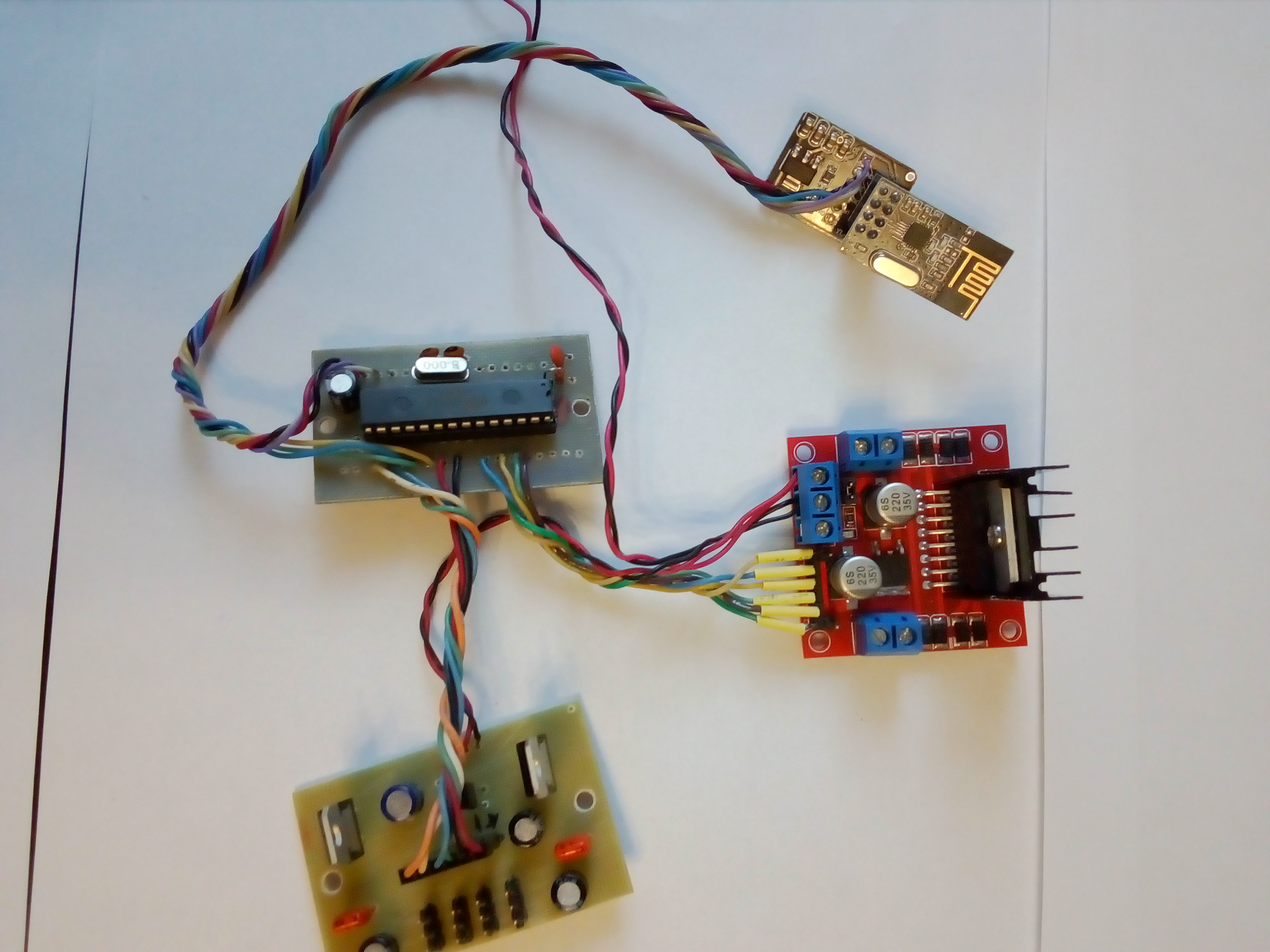
Рисунок 9. Платы контроллера приемника.
Питание электроники передатчика и приемника осуществляется от аккумуляторов, напряжением - 7,2 вольт. Принципиальные схемы передатчика и приемника изображены на рисунках 10 и 11 соответственно.
Программное обеспечение написано в открытой среде программирования ARDUINO ID. Скетч для передатчика занимает 7870 байт (19%) в памяти контроллера, а скетч приемника занимает 9160 байт (20%) в памяти контроллера [4, 203].
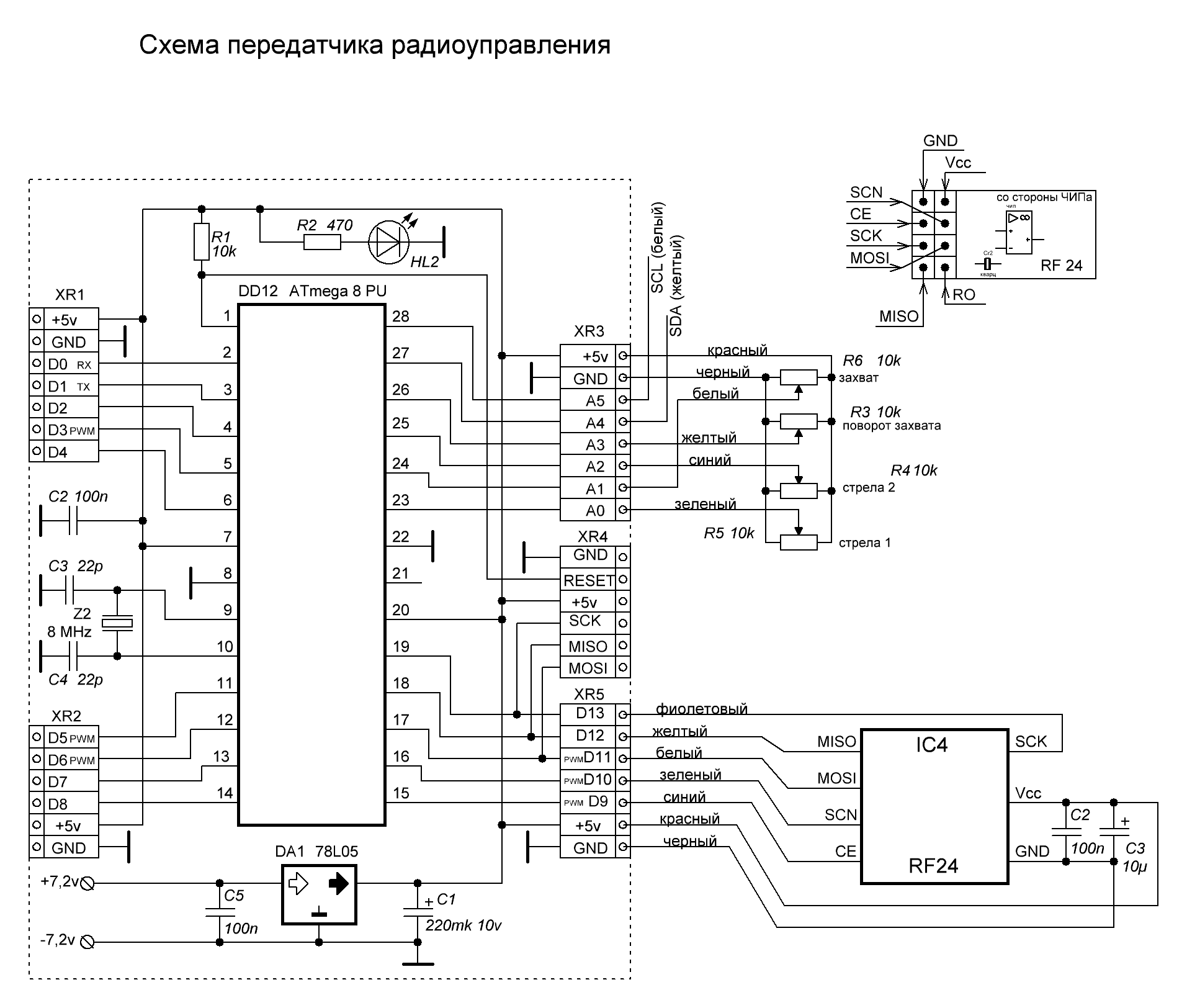
Рисунок 10. Принципиальная схема передатчика (пульт).
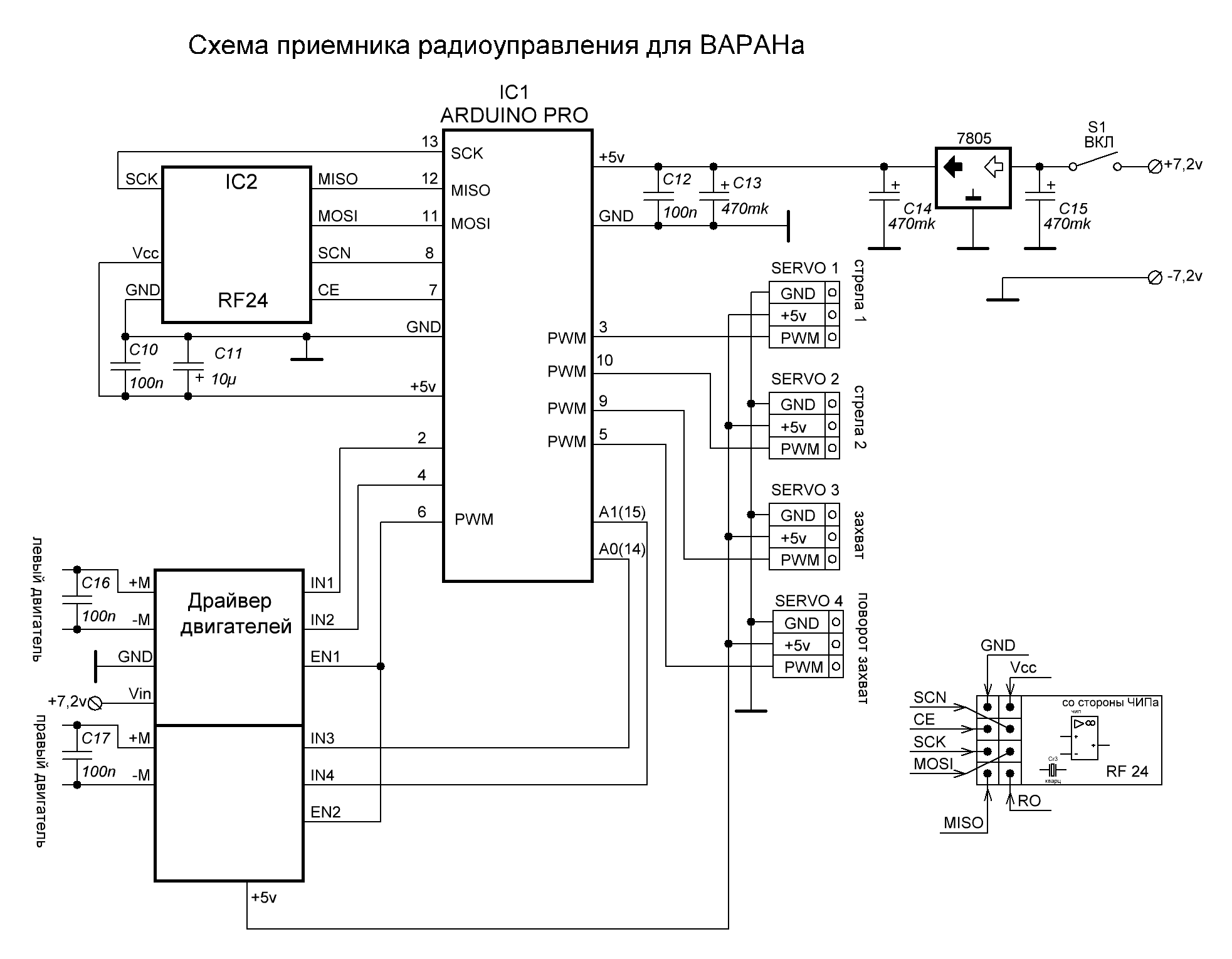
Рисунок 11. Принципиальная схема приемника.
4. Заключение
Для наглядной демонстрации принципа работы манипулятора на шасси, и выполнение поставленных задач, была создана модель дистанционно управляемого манипулятора на гусеничном шасси. Были исследованы конструкция и поведение модели, особенности его системы подчинения оператору. Потребляемый ток во время работы передатчика ставил 100мА, а модели 1200мА.
Принцип действия манипулятора хорошо зарекомендовал себя на испытаниях. Такой способ управления движением и манипулятором не только возможен, но и эффективен. Затраты на изготовление модели составили 1860 рублей.
При относительно невысокой стоимости, такой манипулятор способен обеспечить достаточную производительность при опасных для человека работах. Среди преимуществ, которыми обладает манипулятор, можно выделить следующее:
Комфортность - оператор работает в теплом и безопасном помещении, где нет пыли грязи, повышается эффективность работы;
Маневренность – манипулятор может развернуться на небольшом пятачке, что особенно важно при работе в стесненных условиях;
Функциональность – на манипуляторе может устанавливаться сменное оборудование (вилы, захваты, ковши и т.д.);
Экологическая составляющая - благодаря использованию электрических двигателей он не наносит вред экологии.
При работе на больших расстояниях от места управления необходимо добавить в конструкцию видеокамеру и осуществить передачу изображения в реальном времени.
Дистанционно управляемые манипуляторы – это инновационная практичная и универсальная вспомогательная техника.
5. Библиографический список
Литература:
Джон Ловин. Создаем робота-андроида своими руками. - М.: ДМК пресс, 2007.
Микушин А. В. Занимательно о радиоуправлении. - СПб.: БХВ-Петербург, 2006.
Петли В. А. Проекты е использованием контроллера Arduino. - 2-е нзд , перераб и доп. - СПб.: БХВ-Погсрбург, 2015. - 464 с ил.
Соммер У. Программирование микроконтроллерных плат Arduino/Freeduino. М.: БХВ-Петербург, 2012. - 256 с ил.
Эрик Бриньолфсон, Эндрю Макафи. Вторая эра машин. Neoclassic,АСТ - М.: БХВ-Петербург, 2017. - 384 с ил.
Скворцов Б. М. Подъемно-транспортное оборудование. Каталог-справочник. М.: ЦИНТИМ, 1962, 430 с.
Интернет ресурс:
http://www.customelectronics.ru/robo-ruka-sborka-mehaniki - манипулятор на гусеничном ходу.
https://os1.ru/article/20443-gusenichnye-krany-po-prejnemu-universalnye-i-nadejnye - Гусеничные краны.
http://portal-pk.ru/news/124-radioupravlenie-na-arduino-%2B-nrf24l01-%2B-giroskop-gy-521-mpu-6050.html - Радиоуправление на Arduino + NRF24L01.
http://electe.blogspot.com - Мощный полумостовой транзисторный драйвер.
http://www.rc-cars.ru/news/385-podrobno-o-servah-i-tipah-servoprivodov.html - Подробно о сервах и типах сервоприводов
Приложение
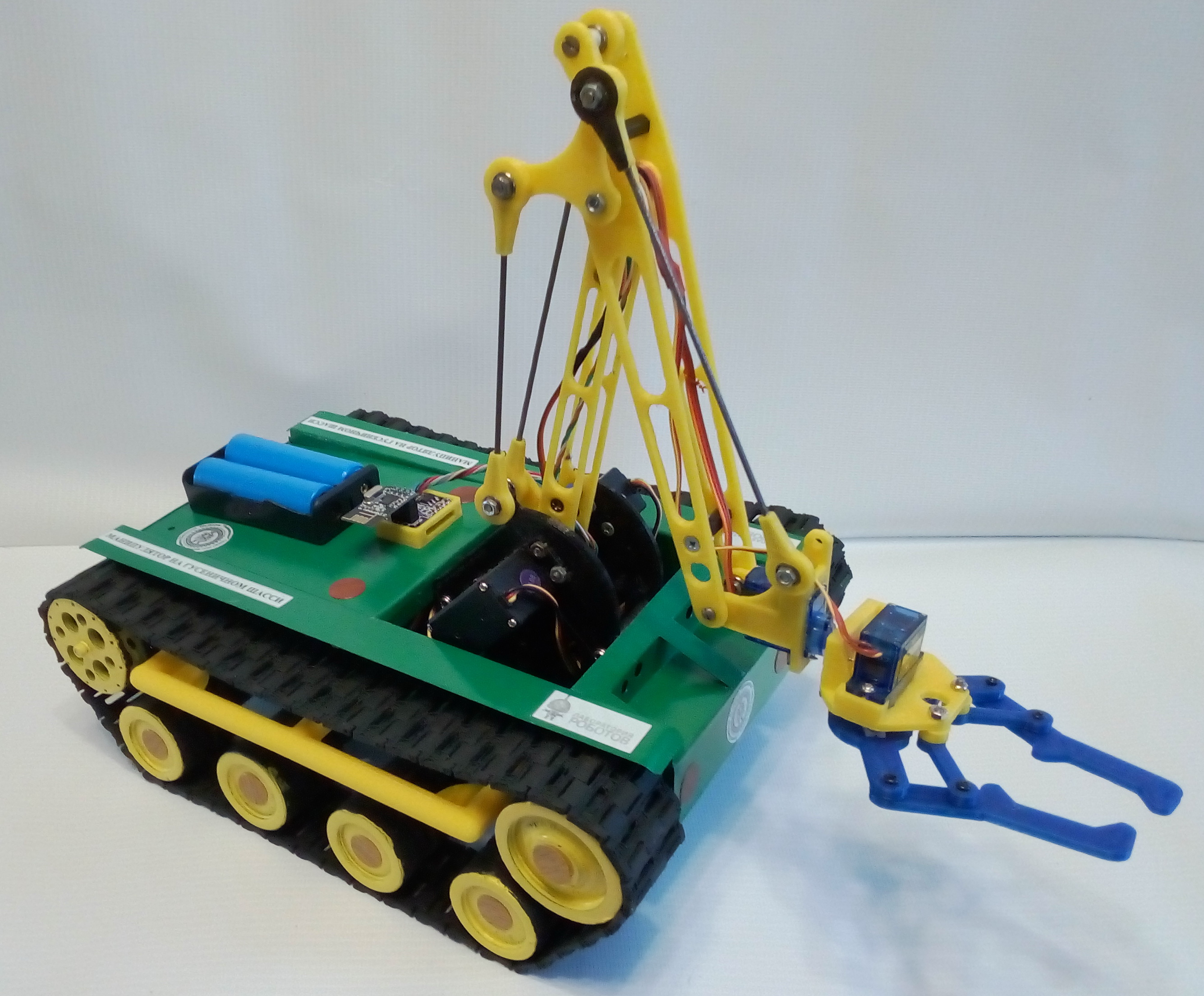
Рисунок 12. Фотография модели манипулятора на гусеничном шасси.

Рисунок 13. Детали гусеницы (трак).
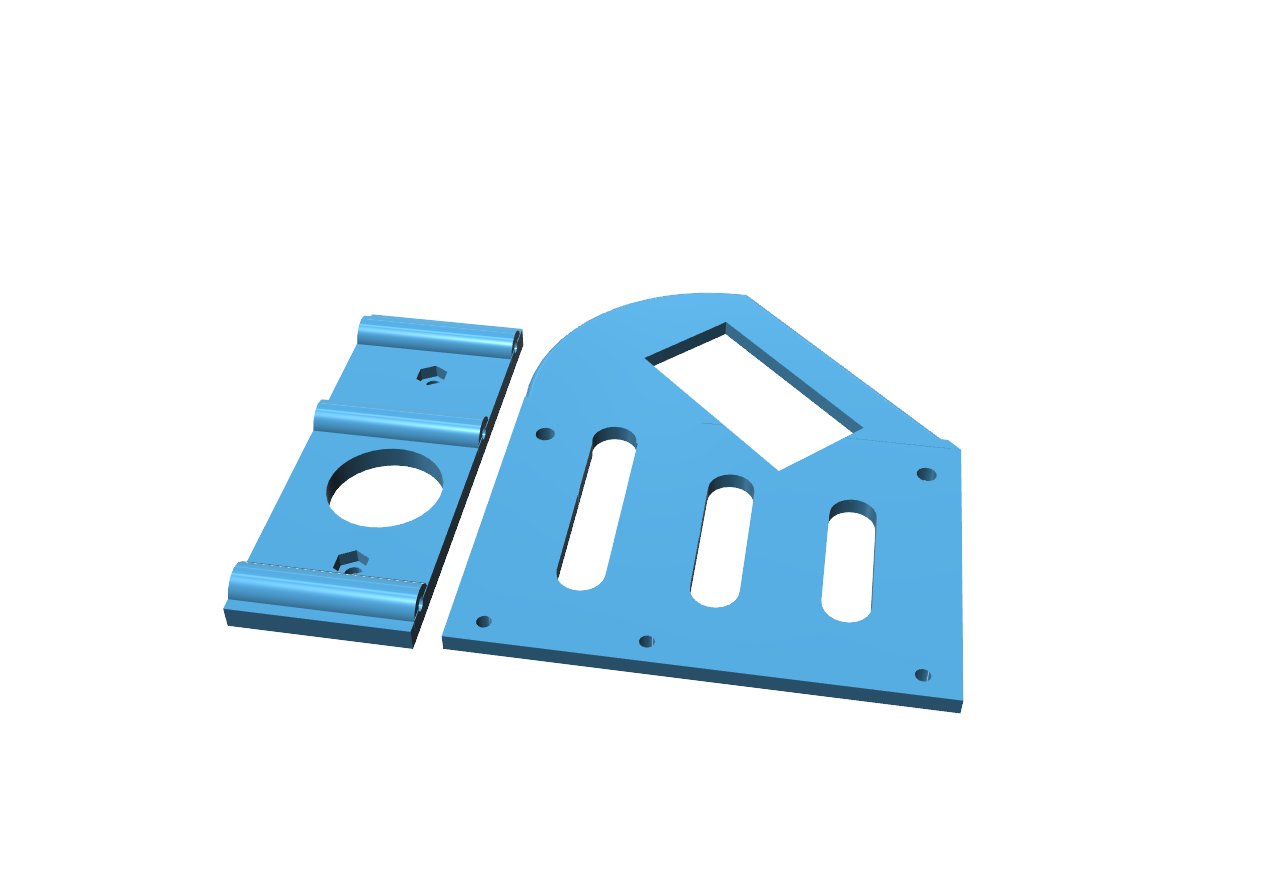
Рисунок 14. Деталь основания манипулятора.
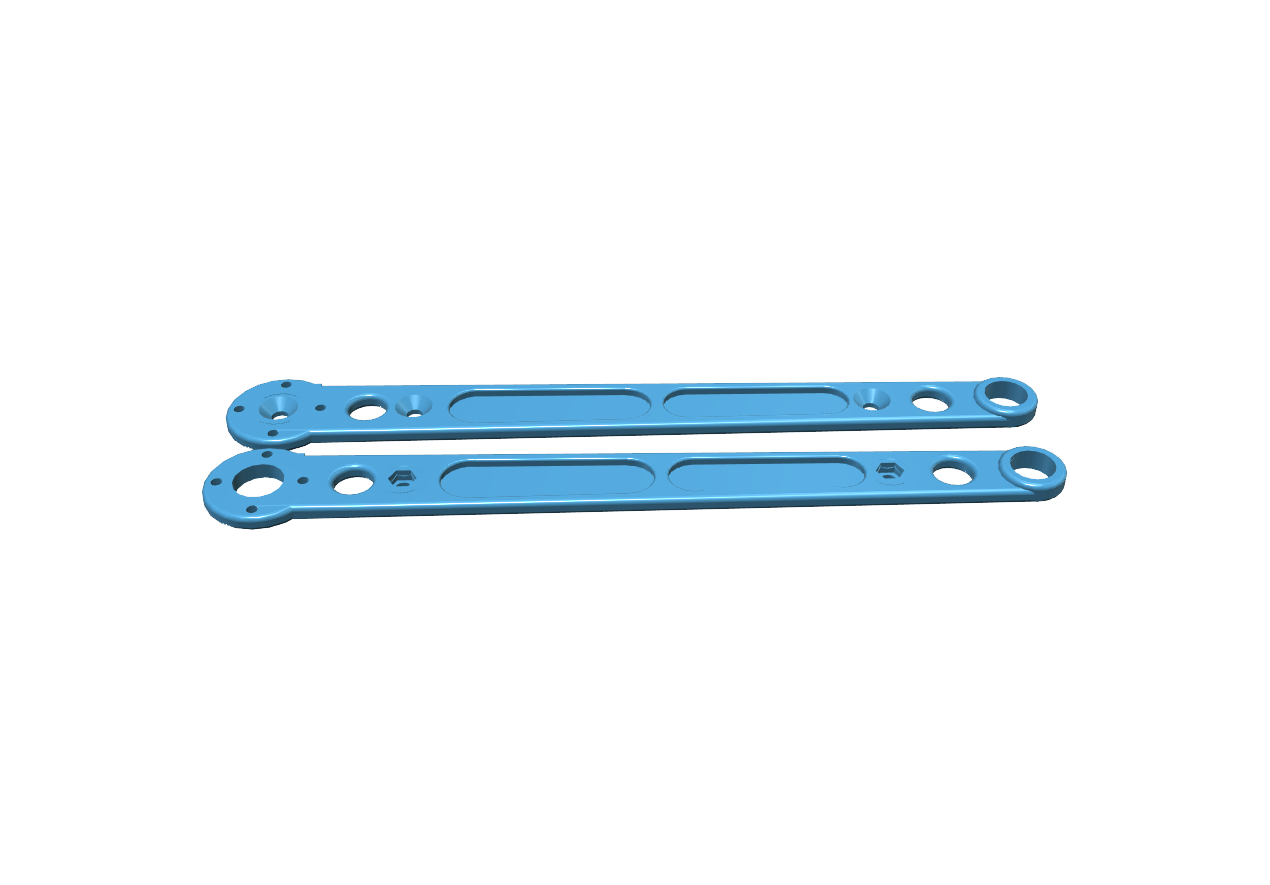
Рисунок 15. Деталь большой стрелы.
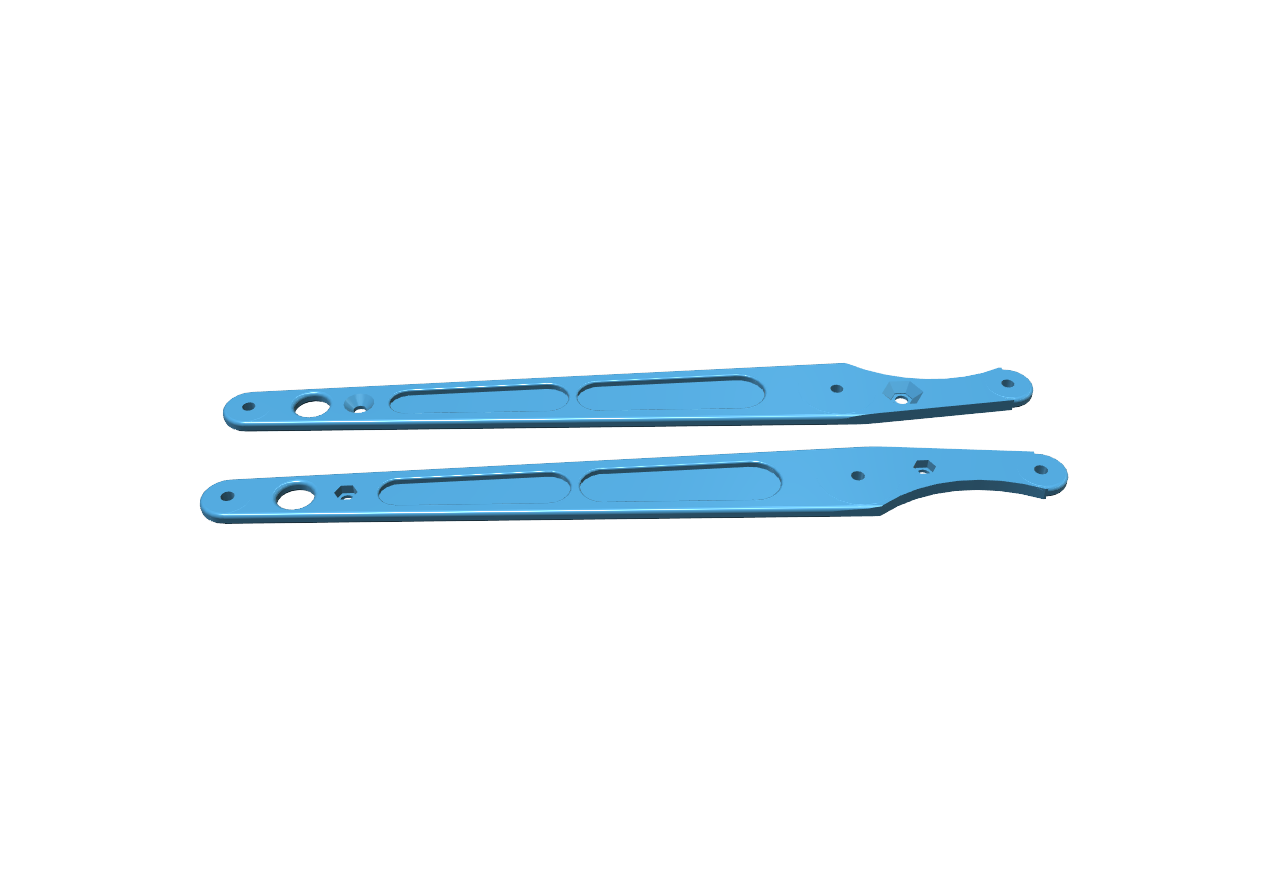
Рисунок 16. Деталь малой стрелы.
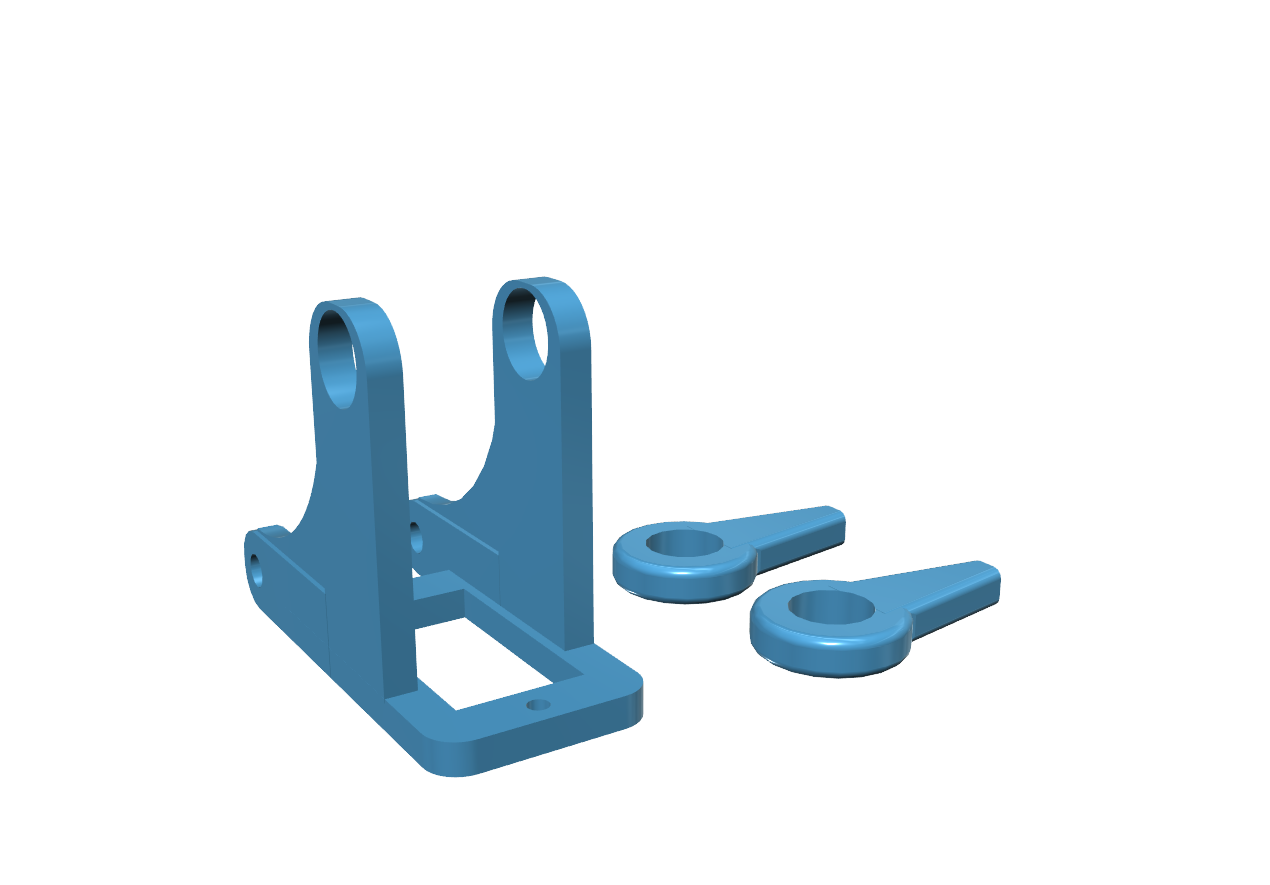
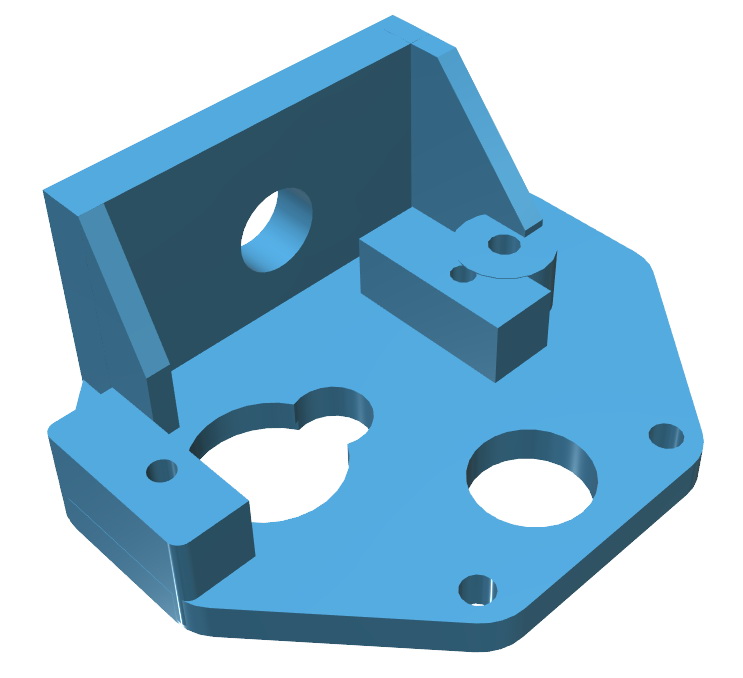
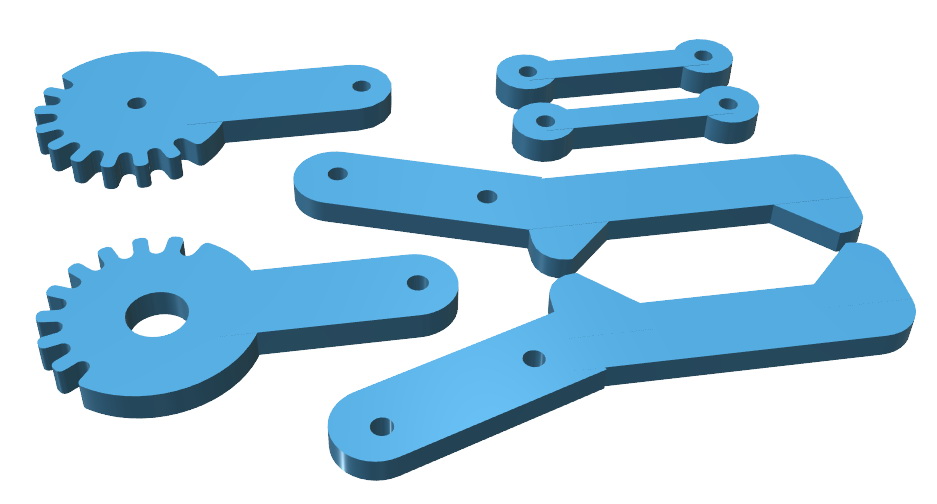
Рисунок 17. Детали захвата.
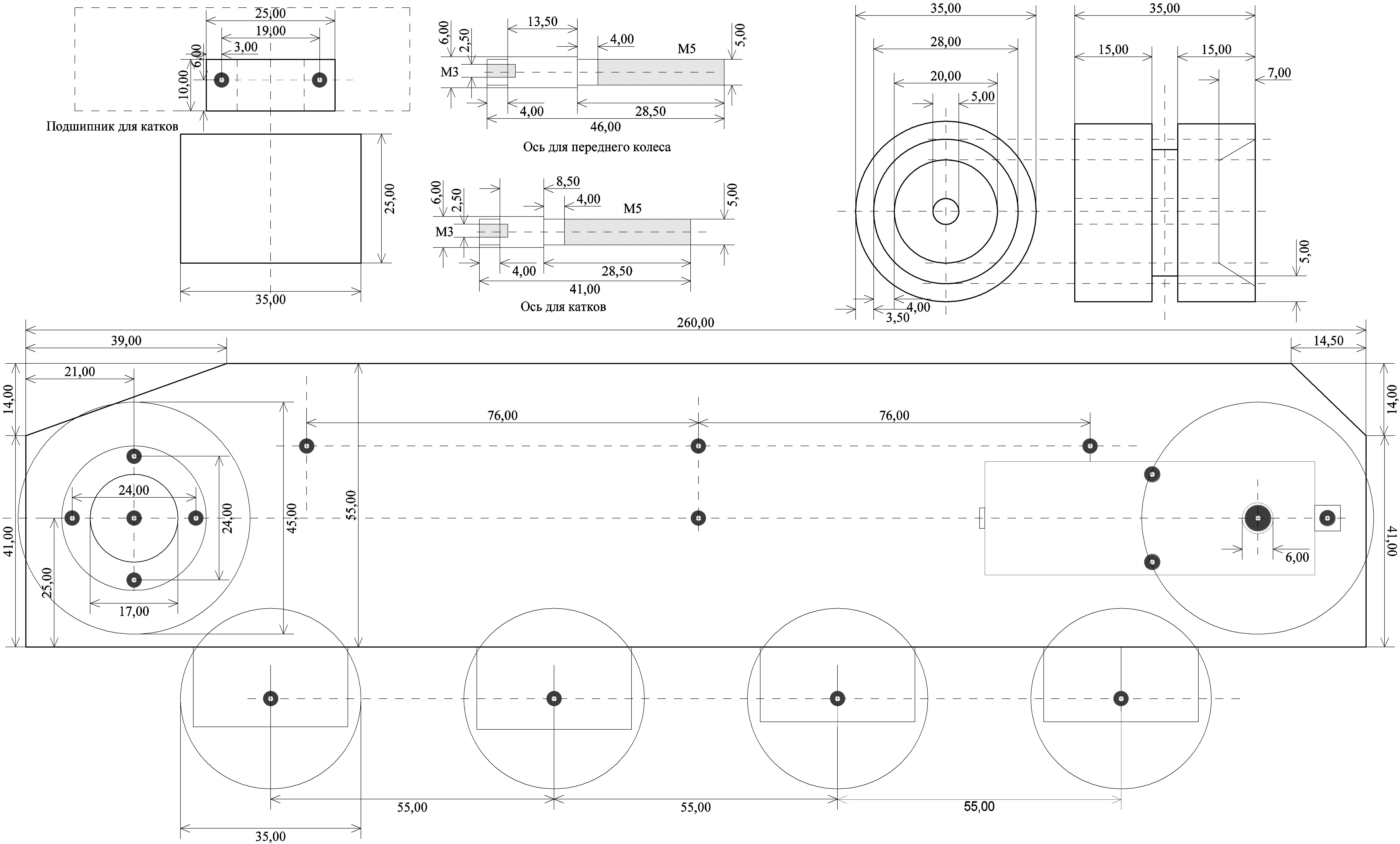
Рисунок 18. Чертеж рамы (боковина).
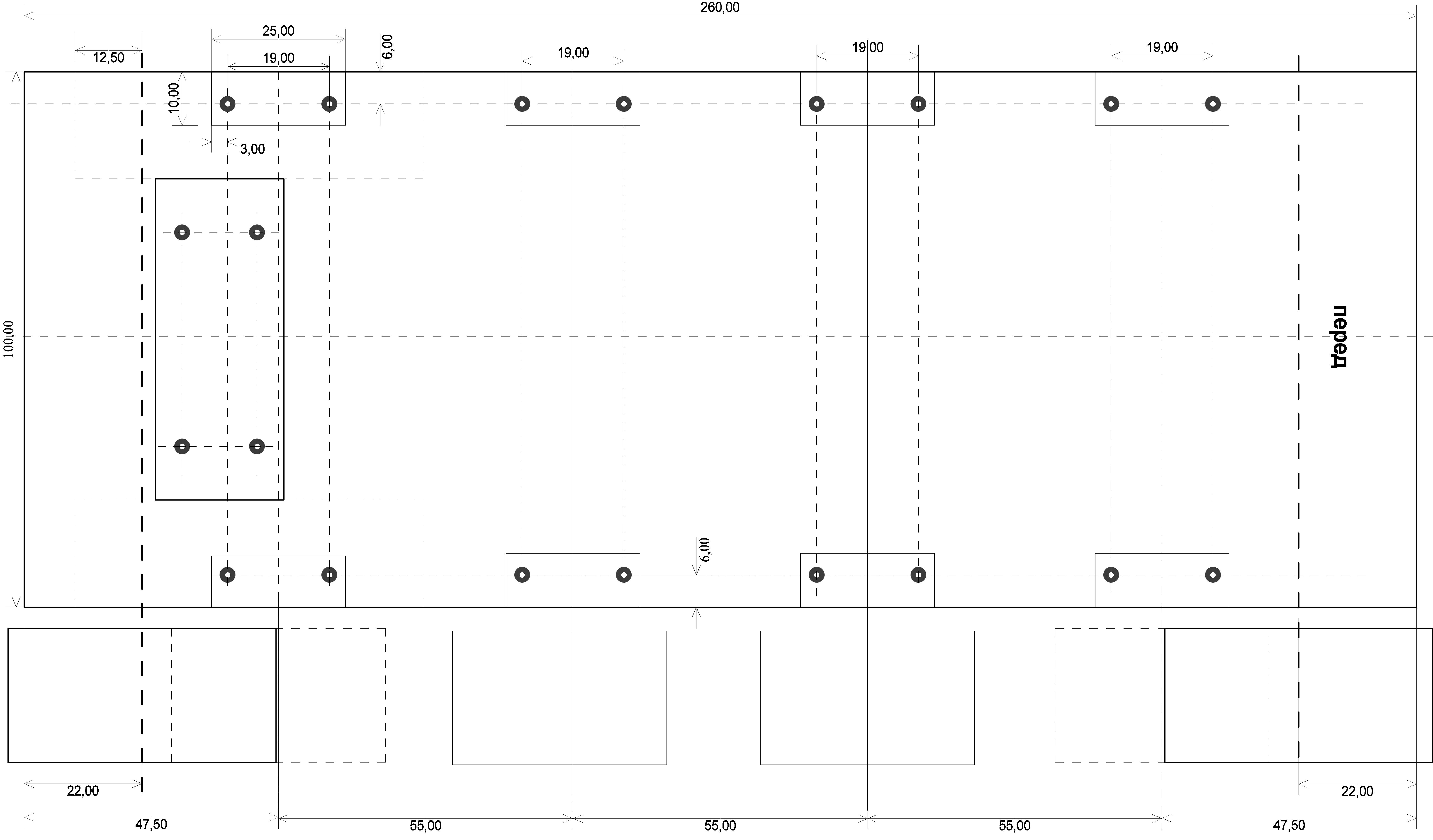
Рисунок 19. Чертеж рамы (основание).
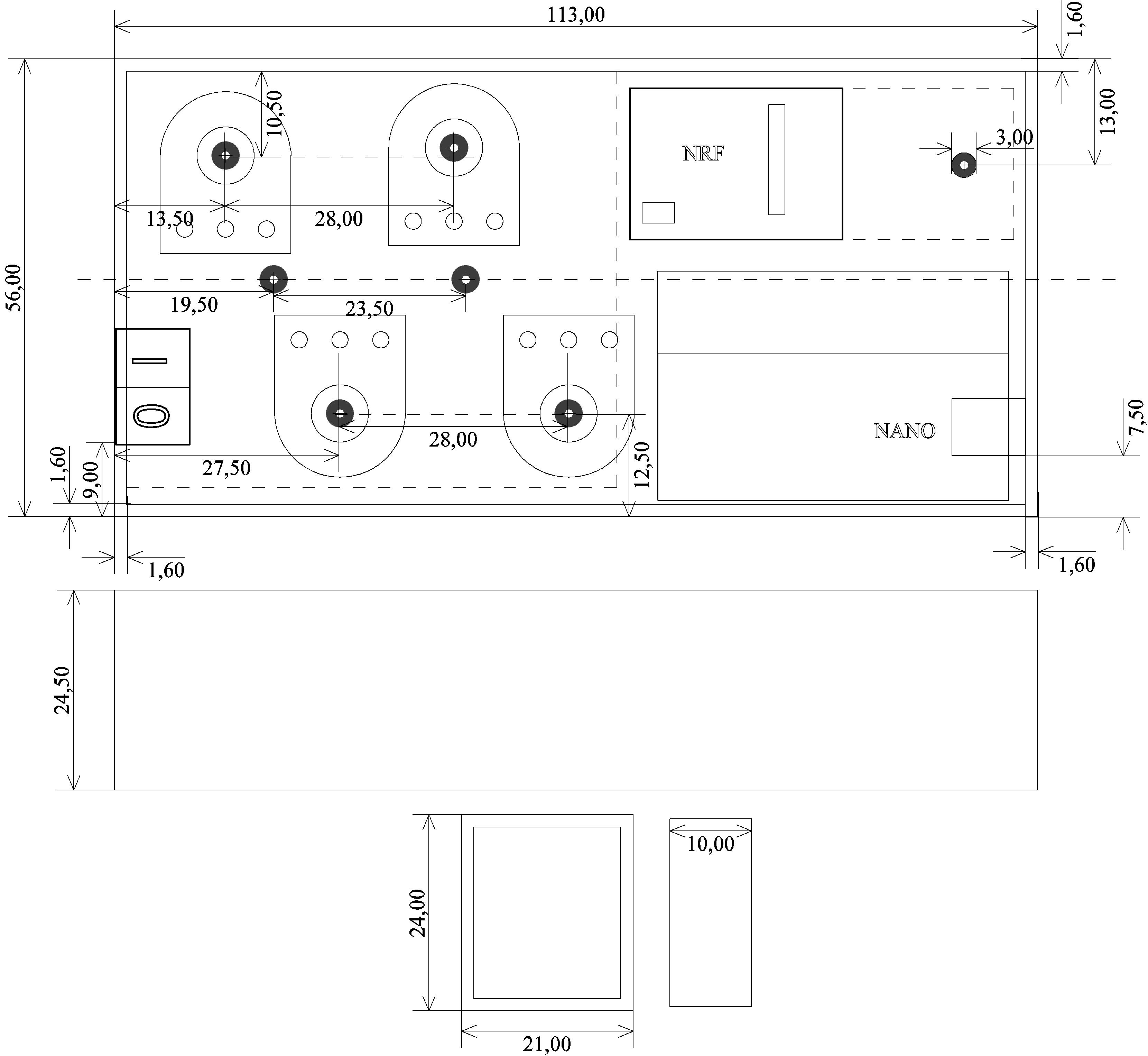
Рисунок 20. Чертеж пульта.
25







© 2021, Барышев Евгений Валентинович 543 0
Рекомендуем курсы ПК и ППК для учителей






Похожие файлы
Вебинар для учителей
Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ