Россия, Архангельск


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 30.05.2023 11:13

Хакимулина Надежда Олеговна
Преподаватель
44 года
Местоположение
Специализация
Презентация на тему: "Вычислительная обработка теодолитного хода"
Категория:
Всем учителям
09.02.2023 16:24

Просмотр содержимого документа
«Презентация на тему: "Вычислительная обработка теодолитного хода"»
Тема урока: Вычислительная обработка теодолитного хода.
Цель: Освоить методику вычисления координат.
План урока
1. Т еодолитный ход.
2. Этапы вычислительной обработки теодолитного хода.
1. Контроль угловых измерений.
2. Уравнивание углов.
3. Контроль линейных измерений.
4. Уравнивание приращений координат.
5. Вычисление координат точек.
3. Ведомость вычисления координат в процессе совместной работы.
Теодолитный ход – это система ломаных линий, углы между которыми измерены на местности теодолитом, а стороны мерным прибором.
В замкнутых теодолитных ходах дирекционные углы сторон полигона вычисляются по формуле:
а) при внутренних измеренных углах вправо по ходу лежащих
α = α n-1 + 180º - β исп.
б) при внутренних измеренных углах влево по ходу лежащих
α = α n-1 + β исп. - 180º
Полевым контролем измерения внутренних углов в полигоне будет сумма всех углов – Ʃβ изм. Из математики известно, что сумма внутренних углов в многоугольнике определяется по формуле:
Ʃβ теор. = 180º · (n – 2) ,
где n – число углов в многоугольнике.
Результаты, полученные при измерениях, содержат в себе ошибки. Разность между измеренной и теоретической суммой называется невязкой и обозначается – ƒ. Следовательно, угловая невязка – ƒβ будет равняться разности между измеренной и теоретической суммой, т.е.
ƒβ = Ʃβизм. – Ʃβтеор.
Полученная угловая невязка сравнивается с допустимой:
ƒβ доп. = ± 2· t · ,
где t – точность теодолита;
n – число углов в полигоне.
Вычислительная обработка теодолитного хода ведётся по этапам:
1. Контроль угловых измерений.
2. Уравнивание углов.
3. Контроль линейных измерений.
4. Уравнивание приращений координат.
5. Вычисление координат точек.
I этап - Контроль угловых измерений
1. Вычисляется сумма измеренных углов в полигоне – Σβизм.
2. Вычисляется теоретическая сумма углов в замкнутом полигоне
Σβтеор. = 180º · (n – 2) , где n – число углов в полигоне.
3. Вычисляется угловая невязка в полигоне – ƒβ, которая получается в результате погрешности при измерении горизонтальных углов
ƒβ = Σβизм. – Σβтеор.
4. Вычисляется допустимая угловая невязка
ƒβ доп. = ± 2 · t ,
где t – точность теодолита
n – число углов в полигоне.
II этап- Уравнивание углов.
5. Если ƒβ ≤ ƒβ доп., то её распределяют с обратным знаком на все углы поровну
δβ =
6. Вычисляются исправленные значения с учётом поправок
β = βизм. ± δ
Сумма исправленных углов должна равняться теоретической сумме
Σβ = Σβтеор.
II этап- Уравнивание углов.
7. По исходному дирекционному углу и исправленным значениям углов вычисляются дирекционные углы последующих сторон контролем вычислений является получение исходного дирекционного угла.
αn = αn-1 + 180º - βn
8. По вычисленным дирекционным углам, определяются румбы и их названия, используя формулы зависимости между дирекционными углами и румбами.
III этап- Контроль линейных измерений .
9. Вычисляется периметр теодолитного хода – Р.
10. По румбам и горизонтальным проложениям сторон полигона вычисляются приращения координат
ΔХ = d · cos r
ΔУ = d · sin r
Знаки приращений координат зависят от направления линий, т.е. от названия румбов линий.
11. Вычисляются невязки в приращениях координат
ƒХ = Σ Δ Х
ƒУ = Σ Δ У
III этап- Контроль линейных измерений
12. Вычисляется абсолютная линейная невязка
ƒабс. =
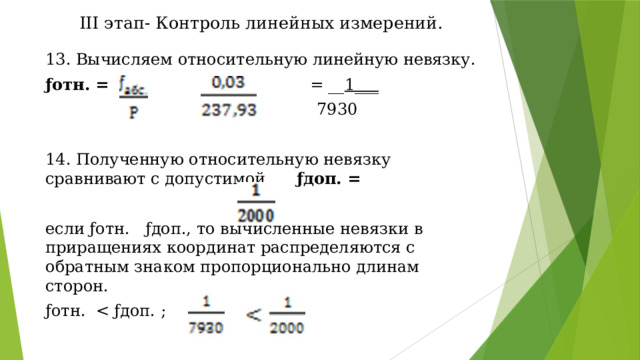
13. Вычисляется относительная линейная невязка
ƒотн. =
14. Полученную относительную невязку сравнивают с допустимой
ƒдоп. =
если ƒотн. ≤ ƒдоп., то вычисленные невязки в приращениях координат распределяются с обратным знаком пропорционально длинам сторон.
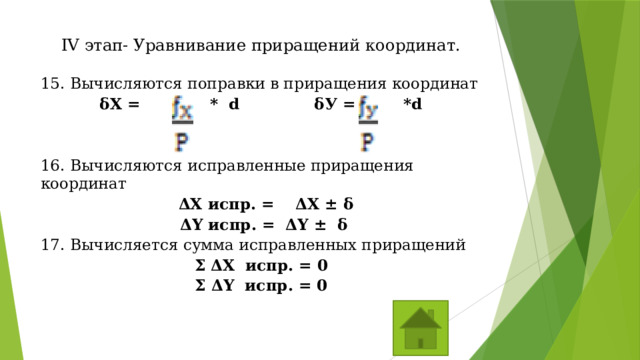
IV этап- Уравнивание приращений координат.
15. Вычисляются поправки в приращения координат
δХ = * d δУ = *d
16. Вычисляются исправленные приращения координат
ΔX испр. = ΔX ± δ
ΔY испр. = ΔY ± δ
17. Вычисляется сумма исправленных приращений
Σ ΔX испр. = 0
Σ ΔY испр. = 0
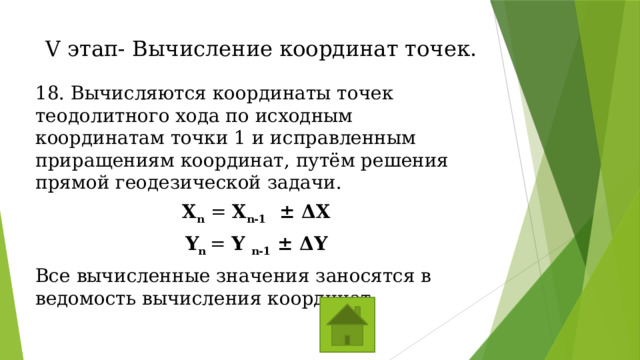
V этап- Вычисление координат точек.
18. Вычисляются координаты точек теодолитного хода по исходным координатам точки 1 и исправленным приращениям координат, путём решения прямой геодезической задачи.
Х n = Х n-1 ± ΔХ
Y n = Y n-1 ± ΔY
Все вычисленные значения заносятся в ведомость вычисления координат.

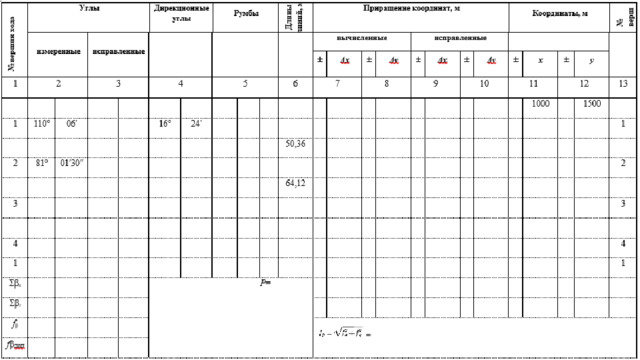
Ведомость вычисления координат
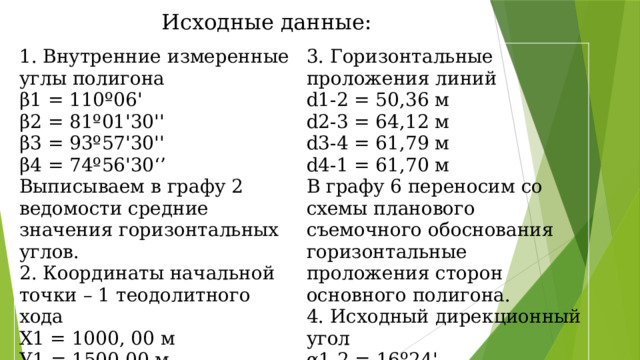
Исходные данные:
1. Внутренние измеренные углы полигона
β1 = 110º06'
3. Горизонтальные проложения линий
β2 = 81º01'30''
d1-2 = 50,36 м
β3 = 93º57'30''
d2-3 = 64,12 м
β4 = 74º56'30‘’
d3-4 = 61,79 м
Выписываем в графу 2 ведомости средние значения горизонтальных углов.
d4-1 = 61,70 м
В графу 6 переносим со схемы планового съемочного обоснования горизонтальные проложения сторон основного полигона.
2. Координаты начальной точки – 1 теодолитного хода
Х1 = 1000, 00 м
4. Исходный дирекционный угол
У1 = 1500,00 м
α1-2 = 16º24'
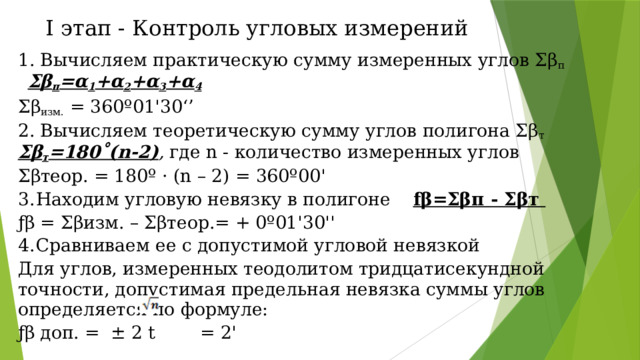
I этап - Контроль угловых измерений
1. Вычисляем практическую сумму измеренных углов Σβ п Σβ п =α 1 +α 2 +α 3 +α 4
Σβ изм. = 360º01'30‘’
2. Вычисляем теоретическую сумму углов полигона Σβ т Σβ т =180˚(n-2) , где n - количество измеренных углов
Σβтеор. = 180º · (n – 2) = 360º00'
3. Находим угловую невязку в полигоне fβ=Σβп - Σβт
ƒβ = Σβизм. – Σβтеор.= + 0º01'30''
4. Сравниваем ее с допустимой угловой невязкой
Для углов, измеренных теодолитом тридцатисекундной точности, допустимая предельная невязка суммы углов определяется по формуле:
ƒβ доп. = ± 2 t = 2'
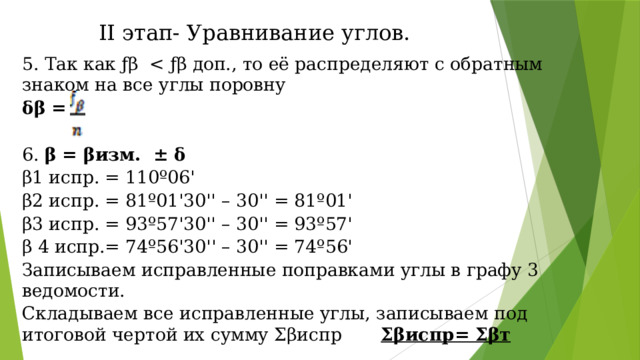
II этап- Уравнивание углов.
5. Так как ƒβ
δβ =
6. β = βизм. ± δ
β1 испр. = 110º06'
β2 испр. = 81º01'30'' – 30'' = 81º01'
β3 испр. = 93º57'30'' – 30'' = 93º57'
β 4 испр.= 74º56'30'' – 30'' = 74º56'
Записываем исправленные поправками углы в графу 3 ведомости.
Складываем все исправленные углы, записываем под итоговой чертой их сумму Σβиспр Σβиспр= Σβт
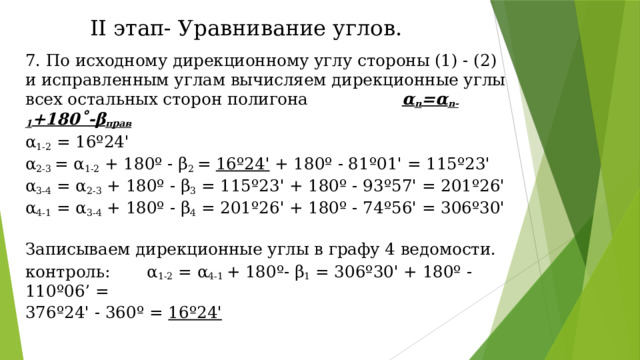
II этап- Уравнивание углов.
7. По исходному дирекционному углу стороны (1) - (2) и исправленным углам вычисляем дирекционные углы всех остальных сторон полигона α n =α n-1 +180˚-β прав
α 1-2 = 16º24'
α 2-3 = α 1-2 + 180º - β 2 = 16º24' + 180º - 81º01' = 115º23'
α 3-4 = α 2-3 + 180º - β 3 = 115º23' + 180º - 93º57' = 201º26'
α 4-1 = α 3-4 + 180º - β 4 = 201º26' + 180º - 74º56' = 306º30'
Записываем дирекционные углы в графу 4 ведомости.
контроль: α 1-2 = α 4-1 + 180º- β 1 = 306º30' + 180º - 110º06’ =
376º24' - 360º = 16º24'
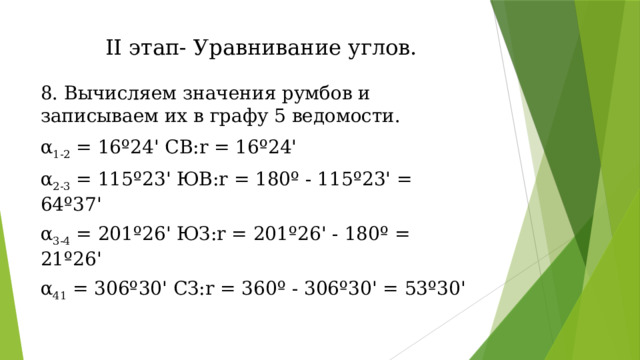
II этап- Уравнивание углов.
8. Вычисляем значения румбов и записываем их в графу 5 ведомости.
α 1-2 = 16º24' СВ:r = 16º24'
α 2-3 = 115º23' ЮВ:r = 180º - 115º23' = 64º37'
α 3-4 = 201º26' ЮЗ:r = 201º26' - 180º = 21º26'
α 41 = 306º30' СЗ:r = 360º - 306º30' = 53º30'
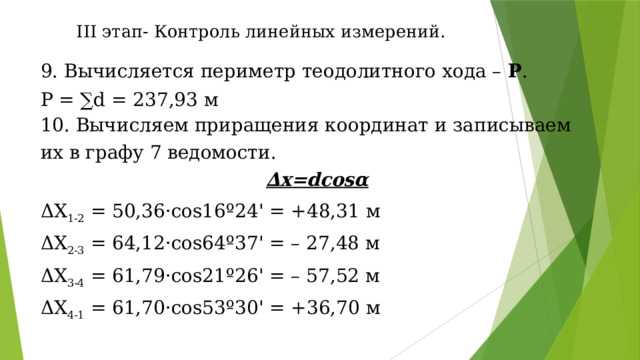
III этап- Контроль линейных измерений.
9. Вычисляется периметр теодолитного хода – Р .
Р = ∑d = 237,93 м
10. Вычисляем приращения координат и записываем
их в графу 7 ведомости.
∆ x=dcosα
ΔХ 1-2 = 50,36·соs16º24' = +48,31 м
ΔХ 2-3 = 64,12·соs64º37' = – 27,48 м
ΔХ 3-4 = 61,79·соs21º26' = – 57,52 м
ΔХ 4-1 = 61,70·соs53º30' = +36,70 м
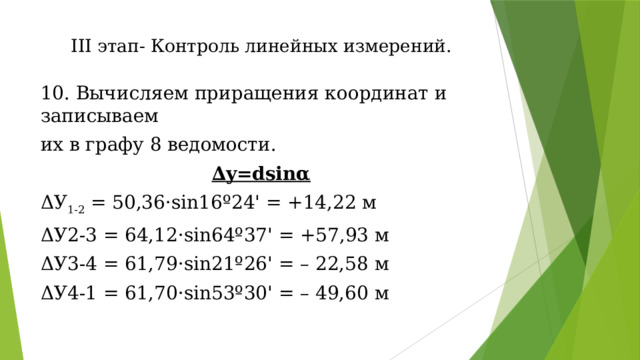
III этап- Контроль линейных измерений.
10. Вычисляем приращения координат и записываем
их в графу 8 ведомости.
∆ y=dsinα
ΔУ 1-2 = 50,36·sin16º24' = +14,22 м
ΔУ2-3 = 64,12·sin64º37' = +57,93 м
ΔУ3-4 = 61,79·sin21º26' = – 22,58 м
ΔУ4-1 = 61,70·sin53º30' = – 49,60 м
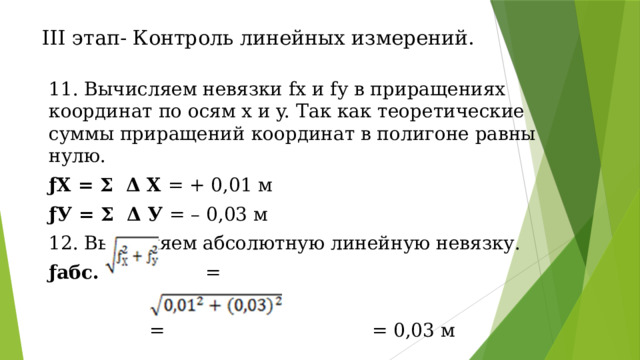
III этап- Контроль линейных измерений.
11. Вычисляем невязки fх и fу в приращениях координат по осям x и y. Так как теоретические суммы приращений координат в полигоне равны нулю.
ƒХ = Σ Δ Х = + 0,01 м
ƒУ = Σ Δ У = – 0,03 м
12. Вычисляем абсолютную линейную невязку.
ƒабс. = =
= = 0,03 м
III этап- Контроль линейных измерений.
13. Вычисляем относительную линейную невязку.
ƒотн. = = = __ 1___
7930
14. Полученную относительную невязку сравнивают с допустимой ƒдоп. =
если ƒотн. ƒдоп., то вычисленные невязки в приращениях координат распределяются с обратным знаком пропорционально длинам сторон.
ƒотн.
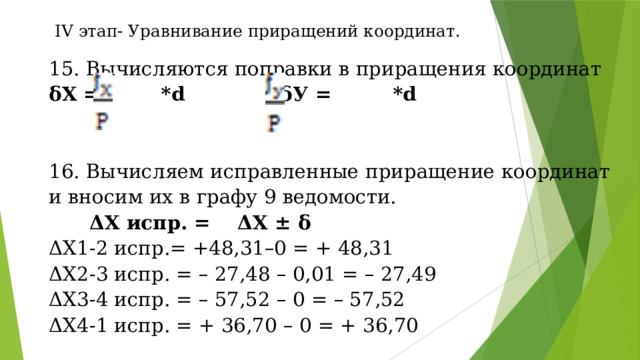
IV этап- Уравнивание приращений координат.
15. Вычисляются поправки в приращения координат
δХ = *d δУ = *d
16. Вычисляем исправленные приращение координат
и вносим их в графу 9 ведомости.
ΔX испр. = ΔX ± δ
ΔХ1-2 испр.= +48,31–0 = + 48,31
ΔХ2-3 испр. = – 27,48 – 0,01 = – 27,49
ΔХ3-4 испр. = – 57,52 – 0 = – 57,52
ΔХ4-1 испр. = + 36,70 – 0 = + 36,70
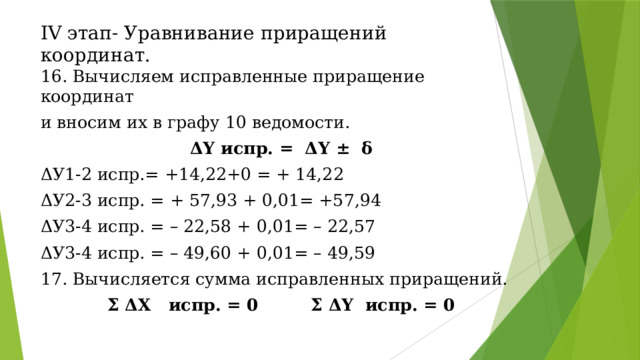
IV этап- Уравнивание приращений координат.
16. Вычисляем исправленные приращение координат
и вносим их в графу 10 ведомости.
ΔY испр. = ΔY ± δ
ΔУ1-2 испр.= +14,22+0 = + 14,22
ΔУ2-3 испр. = + 57,93 + 0,01= +57,94
ΔУ3-4 испр. = – 22,58 + 0,01= – 22,57
ΔУ3-4 испр. = – 49,60 + 0,01= – 49,59
17. Вычисляется сумма исправленных приращений.
Σ ΔX испр. = 0 Σ ΔY испр. = 0
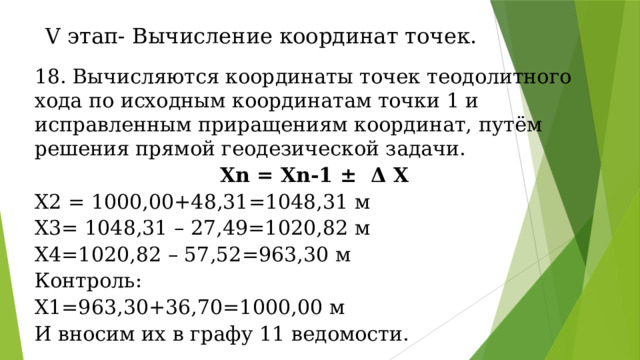
V этап- Вычисление координат точек.
18. Вычисляются координаты точек теодолитного хода по исходным координатам точки 1 и исправленным приращениям координат, путём решения прямой геодезической задачи.
Хn = Хn-1 ± Δ Х
Х2 = 1000,00+48,31=1048,31 м
Х3= 1048,31 – 27,49=1020,82 м
Х4=1020,82 – 57,52=963,30 м
Контроль:
Х1=963,30+36,70=1000,00 м
И вносим их в графу 11 ведомости.
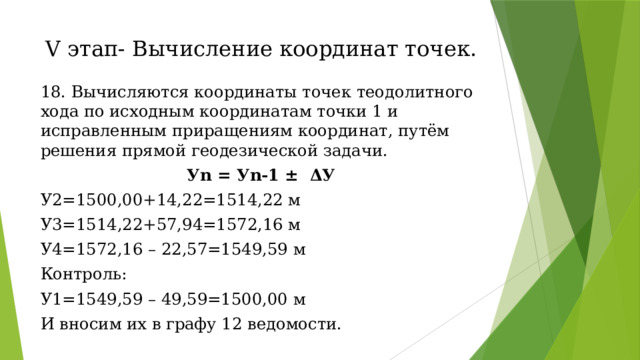
V этап- Вычисление координат точек.
18. Вычисляются координаты точек теодолитного хода по исходным координатам точки 1 и исправленным приращениям координат, путём решения прямой геодезической задачи.
Уn = Уn-1 ± ΔУ
У2=1500,00+14,22=1514,22 м
У3=1514,22+57,94=1572,16 м
У4=1572,16 – 22,57=1549,59 м
Контроль:
У1=1549,59 – 49,59=1500,00 м
И вносим их в графу 12 ведомости.










Вебинар для учителей
Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ