Российская Федерация, Тюмень


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 04.02.2024 14:16

Жгурова Ирина Алексеевна
Преподаватель высшей квалификационной категории, член Российского Союза Писателей
70 лет
Местоположение
Специализация
МЕТОДИЧЕСКИЕ УКАЗАНИЯ к лабораторной работе № 1.2 по Теории механизмов и машин «Структурный анализ плоского механизма»
Категория:
Технология
08.11.2017 19:44

Просмотр содержимого документа
«МЕТОДИЧЕСКИЕ УКАЗАНИЯ к лабораторной работе № 1.2 по Теории механизмов и машин «Структурный анализ плоского механизма»»
И. А. Жгурова
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к лабораторной работе № 1.2 по теории механизмов и машин
«Структурный анализ плоского механизма»
Введение
Теория механизмов и машин – научная дисциплина, которая изучает структуру, кинематику и динамику механизмов в связи с их анализом и синтезом.
Задачи ТММ: разработка общих методов исследования структуры, геометрии, кинематики и динамики типовых механизмов и их систем.
Типовые механизмы – простые механизмы, имеющие при различном функциональном назначении широкое применение в машинах, для которых разработаны типовые методы и алгоритмы синтеза и анализа.
Механизм – кинематическая цепь, в состав которой входят неподвижное звено (стойка) и число степеней свободы которой равно числу обобщённых координат, характеризующих положение цепи относительно стойки.
Машина – техническое устройство, выполняющее преобразование энергии, материалов и информации с целью облегчения физического и умственного труда человека, повышения его качества и производительности.
Всякий механизм состоит из отдельных деталей. Одна жёсткая деталь или жёсткая система деталей является звеном механизма. Неподвижное звено (стойка) – корпус или рама машины и связанные с ними детали – в механизме только одна.
Подвижные звенья бывают входными (ведущими) и выходными (ведомыми). Входному звену сообщается движение, выходное звено осуществляет требуемое движение. Координаты начального звена являются обобщёнными для данного механизма.
Кинематическая пара – подвижное соединение двух соприкасающихся звеньев. Кинематическая цепь – система звеньев связанных между собой кинематическими парами. Класс кинематической пары определяется числом налагаемых связей на движения звеньев.
Класс семейства механизма определяется числом общих связей, наложенных на механизм. Класс механизма определяется наивысшим классом групп звеньев. Класс группы звеньев определяется наивысшим классом контура группы. Класс контура определяется числом кинематических пар контура.
Теоретическое обоснование
Плоский механизм – механизм, у которого все звенья перемещаются в одной плоскости или в параллельных плоскостях. Плоский механизм является механизмом 3-го семейства, так как на движение всех его звеньев наложены 3 общих связи. Структурная формула кинематической цепи плоского механизма (формула Чебышева):
W = 3n – 2р5 – р4
где:
w – степень подвижности механизма,
n – число подвижных звеньев,
р5 – число кинематических пар 5-го класса,
р4 – число кинематических пар 4-го класса.
В плоских механизмах все пары 4-го класса являются высшими, а пары 5-го класса – низшими.
При структурном анализе плоских механизмов высшие пары можно заменять низшими при выполнении условий:
степень подвижности механизма должна оставаться неизменной,
относительное движение звеньев должно сохраняться.
Общие правила замены высших пар низшими:
если высшие пары представляют собой соприкасающиеся окружности, то при замене низшие пары находятся в центре этих окружностей,
если высшие пары представляют собой окружность или любую произвольную кривую, с одной стороны, и точечный контакт, с другой стороны, то кинематические пары замены находятся в точке контакта и в центре кривизны,
если контакт в высшей паре происходит по линии, то замена осуществляется поступательной парой.
При расчёте степени подвижности механизма необходимо не учитывать избыточные (пассивные) связи и лишние степени свободы, которые несут статическую неопределённость системы.
При структурном анализе необходимо решить следующие задачи:
определить степень подвижности механизма (число степеней свободы),
выделить структурные группы Ассура, выделить механизм 1-го класса, определить класс групп и класс механизма.
Число степеней свободы равно числу обобщённых координат, характеризующих положение кинематической цепи относительно стойки и равно числу входных звеньев. Механизм 1-го класса – входное звено, соединённое в кинематическую пару со стойкой, имеет одну степень свободы (w = 1).
Группа Ассура – незамкнутая кинематическая цепь с нулевой степенью подвижности. В механизмах, используемых в машиностроении, применяются сочетания чисел подвижных звеньев и кинематических пар, составляющих группу звеньев:
n = 2, р5 = 3;
n = 4, р5 = 6.
Класс группы Ассура определяется наивысшим числом кинематических пар, входящих в замкнутый контур. Порядок структурной группы определяется числом элементов звеньев, которыми она присоединяется к механизму; при этом нельзя присоединять группу к одному и тому же звену. Группа, имеющая 2 звена и 3 кинематические пары 5-го класса, называется группой 2-го класса 2-го порядка, или двухповодковой группой. Второе сочетание числа подвижных звеньев и кинематических пар образует группу 3-го класса 3-го порядка, или трёхповодковую.
Самая простая структурная группа (n = 2, р5 = 3), состоящая из двух звеньев и трёх кинематических пар, имеет 5 видов в зависимости от сочетания вращательных и поступательных пар:
группа 1-го вида – все пары вращательные (ВВВ),
группа 2-го вида – на конце одного из звеньев поступательная пара (ВВП),
группа 3-го вида – в середине поступательная пара (ВПВ),
группа 4-го вида – на конце обоих звеньев поступательные пары (ПВП),
группа 5-го вида – в середине и на конце одного из звеньев поступательная пара (ВПП).
Структурный анализ механизма следует проводить путём разбиения его на структурные группы в порядке, обратном образованию механизма, то есть выделять группы следует начать с наиболее удалённой (последней в порядке присоединению их к механизму 1-го класса).
В результате отсоединения структурных групп остаётся механизм 1-го класса.
Разложение механизма на структурные группы необходимо для решения задач кинематического и силового анализа.
Основные виды плоских рычажных механизмов.
Простейшие четырёхзвенные плоские механизмы состоят из одного неподвижного звена (стойки) и трёх подвижных звеньев. Если все пары вращательные, то механизм называется шарнирным четырёхзвенником. Звено, совершающее полный оборот вокруг оси вращения, называется кривошипом. Звено, совершающее вращательное движение на неполный оборот, называется коромыслом. Звено, совершающее плоскопараллельное движение, называется шатуном. Звено, соединённое со стойкой поступательной парой в неподвижных направляющих, называется ползуном, а весь механизм – кривошипно-ползунным. Если ползун перемещается по подвижной направляющей, то механизм называется кулисным. Коромысло, служащее подвижной направляющей для ползуна называется кулисой, а ползун – кулисным камнем.
Кулачковые механизмы
В машиностроении для воспроизведения ведомым звеном неравномерного движения по заданному закону с остановками определённой продолжительности применяют кулачковые механизмы, где профиль одного из звеньев (кулачка) отвечает заданному закону.
Кулачковый механизм состоит из звеньев: стойки, кулачка и ведомого звена – толкателя, коромысла. Для уменьшения потерь на трение и износ профиля кулачка ведомое звено снабжают роликом, катящимся по профилю кулачка.
При помощи кулачковых механизмов можно преобразовывать с изменением закона движения:
поступательное движение в поступательное,
поступательное движение в качательное,
вращательное движение в возвратно-поступательное,
вращательное движение в качательное,
сложное движение двух независимых переменных в движение ведомого звена (поступательное или качательное).
Для обеспечения постоянного контакта ведомого звена с кулачком применяют силовое или кинематическое (геометрическое) замыкание.
Цель работы
Изучить модель механизма и определить принцип его работы
Составить структурную и кинематическую схемы механизма
Произвести структурный анализ и определить степень подвижности механизма (число обобщённых координат)
Содержание работы
Ознакомиться с теоретическим обоснованием работы
Ознакомиться с лабораторным оборудованием и инструментами
Ознакомиться с порядком и методикой проведения лабораторной работы
Произвести осмотр модели механизма и определить принцип его действия
Произвести необходимые замеры длин звеньев модели механизма
Составить структурную и кинематическую схемы модели механизма в масштабе
Провести структурный анализ кинематической схемы модели механизма, сделать необходимые расчёты
Сделать вывод о результатах структурного анализа
Оформить отчёт по лабораторной работе
Ответить на вопросы для самопроверки
Защитить лабораторную работу
Расчётные формулы
Формула Чебышева для определения степени подвижности плоского механизма:
w = 3n – 2р5 – р4, где
w – степень подвижности механизма,
n – число подвижных звеньев,
р5 – число кинематических пар 5-го класса,
р4 – число кинематических пар 4-го класса.
Оборудование и инструменты
Модели плоских механизмов
Линейка измерительная, штангенциркуль
Карандаш, бумага
Калькулятор
ПК
Исходные данные к проведению структурного анализа
Модель плоского механизма типа ТММ 03 -1
Структурная схема модели механизма
Кинематическая схема модели механизма
Порядок выполнения работы
Произвести внешний осмотр модели
Изучить принцип действия модели
Определить начальное звено
Выбрать масштабный коэффициент
Начертить структурную схему
Начертить кинематическую схему заменяющего механизма
Сделать подсчёт числа звеньев и кинематических пар 5-го и 4-го классов по двум схемам
Занести результаты в таблицы:
а) Таблица .2.1. Подвижные звенья
в) Таблица. 2.2. Кинематические пары
Сделать расчёт степени подвижности по формуле Чебышева для обеих схем
Разбить кинематическую схему на группы Ассура и выделить механизм 1-го класса
Определить класс групп и класс механизма, результаты занести в таблицу 2.3.
Сделать вывод:
число подвижных звеньев,
число кинематических пар 5-го класса,
число кинематических пар 4-го класса,
лишние степени свободы,
заменяющий механизм: n, р5, р4.
количество групп Ассура и их класс,
количество начальных звеньев
класс и семейство модели плоского механизма, формула строения механизма.
Оформить отчёт о работе:
титульный лист,
структурная схема, кинематическая схема,
расчёты, таблицы,
вывод о проделанной работе.
Подвижные звенья модели механизма по структурной схеме
Таблица 2. 1
| № | Название звена | Относительное движение звена | примечание |
| 1 | 2 | 3 | 4 |
Подвижные звенья кинематической схемы заменяющего механизма
Таблица 2.1а
| № | Название звена | Относительное движение звена | примечание |
| 1 | 2 | 3 | 4 |
Кинематические пары по структурной схеме модели механизма
Таблица 2.2
| символ | название | класс | Высшая/низшая | примечание |
| 1 | 2 | 3 | 4 | 5 |
Кинематические пары по кинематической схеме заменяющего механизма
Таблица.2.2а
| символ | название | класс | Высшая/низшая | примечание |
| 1 | 2 | 3 | 4 | 5 |
Группы Ассура по кинематической схеме заменяющего механизма
Таблица 2.3
| № | схема | класс | порядок | звенья |
| 1 | 2 | 3 | 4 | 5 |
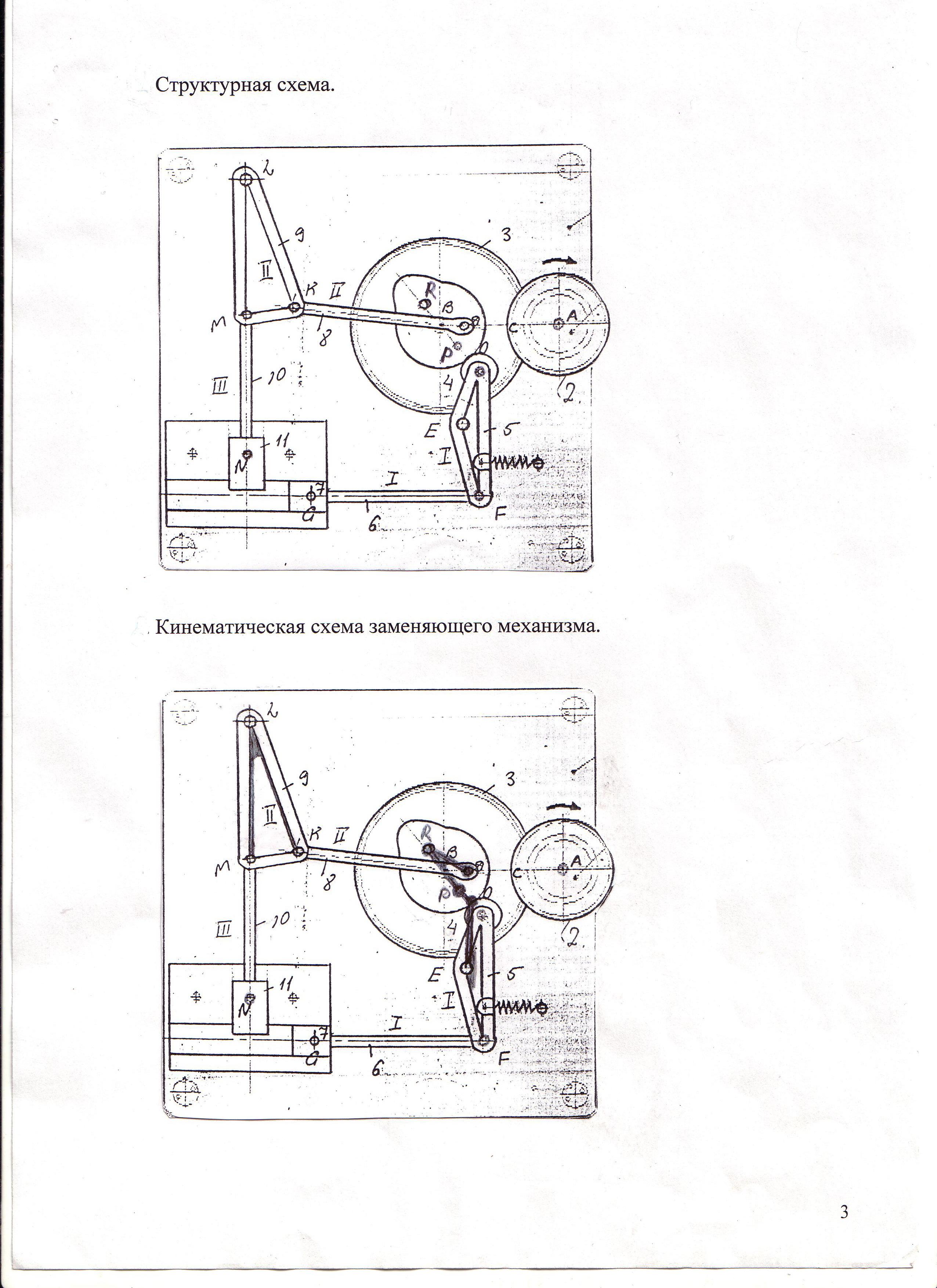
Рис. 4.2
Кинематическая схема заменяющего механизма
Контрольные вопросы для самопроверки
Дать определения следующим понятиям теории механизмов:
звено механизма, элементы звена,
названия звеньев,
подвижное и неподвижное звено механизма,
ведущие и ведомые звенья,
входные и выходные звенья,
начальное звено,
кинематическая пара (КП),
виды замыкания кинематических пар,
кинематическая цепь (КЦ),
замкнутая и незамкнутая КЦ,
плоская КЦ,
простая и сложная КЦ,
виды КП по месту контакта,
виды КП по относительному движению звеньев,
класс кинематической пары,
число и виды независимых движений твёрдого тела,
семейство механизма,
структура плоского механизма, формула Чебышева,
способ замены высших пар низшими,
избыточные (пассивные) связи и лишние степени свободы,
принцип Ассура,
механизм 1-го класса,
группа Ассура,
класс группы Ассура,
порядок структурной группы,
виды структурных групп 2-го класса 2-го порядка,
название звеньев рычажных механизмов,
кривошип, коромысло, шатун, ползун, кулиса, направляющие.
Образец выполнения лабораторной работы
Ниже приведён образец выполнения контрольной работы с использованием учебной модели механизма кривошипно – коленного пресса ТММ 03-1-2 М.
образец
Лабораторная работа № 1.
Тема: Структурный анализ
Цель работы: Структурный анализ плоского механизма
Задача: Определить степень подвижности модели плоского механизма кривошипно-коленного пресса
Оборудование: модель механизма кривошипно-коленного пресса ТММ 03-1-2 М.
Ход работы:
изучение принципа работы модели,
построение структурной схемы,
построение кинематической схемы заменяющего механизма,
заполнение таблиц,
расчёт степени подвижности механизма по обеим схемам,
разбиение кинематической схемы на группы Ассура и заполнение таблицы,
выводы по структурному анализу механизма,
оформление лабораторной работы и защита.
Подвижные звенья модели механизма по структурной схеме
Таблица 2.1
| № звена | Название звена | Относительное движение | примечание |
| 2 | Кривошип – зубчатое колесо | вращательное | Ведущее начальное звено |
| 3 | Кулачок – зубчатое колесо | вращательное | Жёсткая система |
| 4 | ролик | вращательное | Лишняя степень свободы, при расчёте не учитываем |
| 5 | Коромысло 1 | качательное (вращение на неполный оборот) | Силовое замыкание – пружина |
| 6 | Шатун 1 | Плоско-параллельное | |
| 7 | Горизонтальный ползун | поступательное | горизонтальные неподвижные направляющие |
| 8
| Шатун 11 | Плоско-параллельное | |
| 9 | Коромысло 11 | качательное | |
| 10 | Шатун 111 | Плоско-параллельное | |
| 11 | Вертикальный ползун | поступательное | Вертикальные неподвижные направляющие |
Подвижные звенья кинематической схемы заменяющего механизма
Таблица 2.1а.
| № звена | Название звена | Относительное движение | примечание |
| 2 | РRD – рычаг | вращательное | Ведущее начальное звено |
| 3 | РО – шатун | плоскопараллельное | |
| 4 | ОЕF – коромысло
| качательное | Входит в 3 КП |
| 5 | GF – шатун | плоскопараллельное | Частный случай – поступательное движение |
| 6 | G – ползун | поступательное | Горизонтальные неподвижные направляющие |
| 7 | N – ползун | поступательное | Вертикальные неподвижные направляющие |
| 8 | МN – шатун | плоскопараллельное | |
| 9 | МLК – коромысло | качательное | Входит в 3 КП |
| 10 | КD – шатун | плоскопараллельное | |
Кинематические пары по структурной схеме модели механизма
Таблица 2..2
| Символ, звенья | название | класс | Высшая/ низшая | примечание |
| А,1-2 | вращательная | 5 | Н | |
| С, 2-3 | зацепление | 4 | В | |
| В, 3-1 | вращательная | 5 | Н | |
| О, 3-4 | цилиндрическая | 4 | В | |
| О, 4-5 | вращательная | 5 | Н | Лишняя степень свободы, не учитывать |
| Е, 5-1 | вращательная | 5 | Н | |
| F, 5-6 | вращательная | 5 | Н | |
| G, 6-7 | вращательная | 5 | Н |
|
| G, 7-1 | поступательная | 5 | Н | |
| D, 3-8 | вращательная | 5 | Н | |
| К, 8-9 | вращательная | 5 | Н | |
| L, 9-1 | вращательная | 5 | Н | |
| М, 9-10 | вращательная | 5 | Н | |
| N, 10-11 | вращательная | 5 | Н | |
| N, 11-1 | поступательная | 5 | Н | |
Кинематические пары по кинематической схеме заменяющего механизма
Таблица 2. 2а
| символ | название | класс | высшая/ низшая | Примечание, № |
| Р | вращательная | 5 | Н | 1, центр кривизны |
| B | вращательная | 5 | Н | 2 |
| D | вращательная | 5 | Н | 3 |
| O | вращательная | 5 | Н | 4 |
| E | вращательная | 5 | Н | 5 |
| F | вращательная | 5 | Н | 6 |
| G | вращательная | 5 | Н | 7 |
| K | вращательная | 5 | Н | 8 |
| L | вращательная | 5 | Н | 9 |
| M | вращательная | 5 | Н | 10 |
| N | вращательная | 5 | Н | 11 |
| G | поступательная | 5 | Н | 12 |
| N | поступательная | 5 | Н | 13 |
Группы Асура по схеме замены
Таблица 2. 3
| № | схема | Класс, вид | порядок | звенья |
| 1 |
о | класс 2, вид 1 | 2 | 3 и 4 |
| 2 | | класс 2, вид 2 | 2 | 5 и 6 |
| 3 | о
О о | класс 2, вид 1 | 2 | 9 и 8 |
| 4 | | класс 2, вид 2 | 2 | 10 и 11 |
 о
о о
о 





 О
О
Определение степени свободы механизма по двум схемам
Структурная схема:
число подвижных звеньев n = 10,
звено, дающее лишнюю степень свободы 1 (не учитываем),
число КП 5-го класса р5 = 12,
число КП 4-го класса р4 = 2,
степень подвижности w = 3n – 2р5 – р4 = 3*9 – 2*12 – 2 = 1
Кинематическая схема заменяющего механизма:
число подвижных звеньев n = 9,
число КП 5-го класса р5 = 13,
степень подвижности w = 3n – 2р5 = 3*9 – 2*13 = 1.
Выводы
Число подвижных звеньев модели механизма без учёта лишних степеней свободы n = 10, число кинематических пар 5-го класса р5 = 12, число кинематических пар 4-го класса р4 = 2;
Формула строения механизма: степень подвижности механизма w = 3n – 2р5 – р4 = 1.
Звено, дающие лишние степень свободы – ролик.
Звенья, являющиеся жёсткой системой деталей: зубчатое колёсо – кривошип и зубчатое колесо-кулачок.
Кинематическая схема заменяющего механизма:
n = 9, р5 = 13, w = 1.
Начальное звено: кривошип-зубчатое колесо.
Группы Ассура: 2 группы 2-го класса 2-го порядка 1-го вида, 2 группы 2-го класса, 2-го порядка 2-го вида.
Механизм плоский, 3-го семейства; 2-го класса, так как в состав кинематической схемы входят группы не выше 2-го класса.
52.
Источник:
УДК 621.01
И. А. Жгурова. Теория механизмов и машин: Учебное пособие. – 3-е издание, перераб. и доп. – Тюмень, ТИУ, 2017. - 165 с.
Пособие представляет собой краткий курс лекций по теории механизмов и машин и содержит разделы: «Структурный анализ и классификация механизмов», «Кинематический анализ механизмов», «Динамический анализ механизмов», «Общие методы синтеза механизмов», «Основы теории машин». Теоретические основы курса сопровождаются практическими заданиями.
Третье издание (1-е издание 2004 г.) переработано и дополнено новыми материалами в соответствии с действующими стандартами. Приведён краткий обзор основных понятий по перечисленным темам и терминология дисциплины. Дана Рабочая программа дисциплины и основные требования к знаниям и умениям учащихся. Предназначено для обучающихся СПО по специальности среднего профессионального образования базовой подготовки 15. 02. 08 Технология машиностроения
Пособие может быть полезным для преподавателей СПО, изучающих теорию механизмов и машин, а так же для студентов высших учебных заведений в качестве практических упражнений.
14












Вебинар для учителей
Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ