Россия, Орёл


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 17.05.2021 12:11

Шевелева Валерия Алексеевна
Студент
21 год
Местоположение
Специализация
"Доклад робототехника"
Категория:
Информатика
17.05.2021 12:07

Просмотр содержимого документа
«"Доклад робототехника"»

|
«Робототехника наших дней»
с. Плещеево 2021г. |
Подготовила студентка 21а группы специальности 44.02.02 Преподавание в начальных классах Шульдешова Александра |

Введение 2
История отрасли 3
Использование робототехники в современном мире 5
Строительная робототехника. 5
Промышленная робототехника. 5
Бытовая робототехника. 6
Медицинская робототехника 7
Космическая робототехника 7
Подводная робототехника. 9
Заключение 10
Список используемой литературы: 10
Введение
Робототехника (от робот и техника; англ. robotics — роботика, робототехника) — прикладная наука, занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой развития производства.
Робототехника опирается на такие дисциплины, как электроника, механика, кибернетика, телемеханика, мехатроник, информатика, а также радиотехника и электротехника. Выделяют строительную, промышленную, бытовую, медицинскую, авиационную и экстремальную (военную, космическую, подводную) робототехнику.
Этимология термина
Слово «роботика» (или «робототехника», «robotics») было впервые использовано в печати Айзеком Азимовым в научно-фантастическом рассказе «Лжец», опубликованном в 1941 году.
В основу слова «робототехника» легло слово «робот», придуманное в 1920 г. чешским писателем Карелом Чапеком и его братом Йозефом для научно-фантастической пьесы Карела Чапека «Р. У. Р.» («Россумские универсальные роботы»), впервые поставленной в 1921 г. и пользовавшейся успехом у зрителей. В ней хозяин завода налаживает выпуск множества андроидов, которые сначала работают без отдыха, но потом восстают и губят своих создателей.
3
История отрасли
Некоторые идеи, положенные позднее в основу робототехники, появились ещё в античную эпоху — задолго до введения перечисленных выше терминов. Найдены остатки движущихся статуй, изготовленных в I веке до нашей эры. В «Илиаде» Гомера говорится, что бог Гефест сделал из золота говорящих служанок, придав им разум (то есть — на современном языке — искусственный интеллект) и силу. Древнегреческому механику и инженеру Архиту Тарентскому приписывают создание механического голубя, способного летать (ок. 400 г. до н. э.). Более двух тысяч лет назад Герон Александрийский создал водяной автомат «Поющая птица» и ряд систем подвижных фигур для античных храмов. В 270 году древнегреческий изобретатель Ктесибий изобрёл особые водяные часы, получившие название клепсидра (или «крадущие время»), которые своим хитроумным устройством вызвали значительный интерес современников.

Рисунок 1
В 1500 году великий Леонардо да Винчи разработал механический аппарат в виде льва, который должен был открывать герб Франции при въезде короля в город. В XVIII веке швейцарским часовщиком П. Жаке-Дрозом была создана механическая кукла «Писец», которая могла быть запрограммирована с помощью кулачковых барабанов на написание текстовых сообщений, содержащих до 40 букв[8]. В 1801 году французский коммерсант Жозеф Жаккар представил передовую по тем временам конструкцию ткацкого станка, который можно было «программировать» с помощью специальных карт с отверстиями для воспроизведения на вытканных полотнах повторяющихся декоративных узоров. В начале XIX века эта идея была позаимствована английским математиком Чарлзом Бэббиджем для создания одной из первых автоматических вычислительных машин[9]. Примерно к 30-м годам XX века появились андроиды, реализующие элементарные движения и способные произносить по команде человека простейшие фразы. Одной из первых таких разработок стала конструкция американского инженера Д. Уэксли, созданная для Всемирной выставки в Нью-Йорке в 1927 году[8].
4
В 50-х годах XX века появились механические манипуляторы для работы с радиоактивными материалами. Они были способны копировать движения рук оператора, который находился в безопасном месте. К 1960-му году были проведены разработки дистанционно управляемых колёсных платформ с манипулятором, телекамерой и микрофоном для обследования и сбора проб в зонах повышенной радиоактивности[8].
Широкое внедрение промышленных станков с числовым программным управлением стало стимулом для создания программируемых манипуляторов, используемых для погрузки и разгрузки станочных систем. В 1954 году американским инженером Д. Деволом был запатентован метод управления погрузочно-разгрузочным манипулятором с помощью сменных перфокарт, как следствие в 1956 году совместно с Д. Энгельбергером им была создана первая в мире промышленная компания «Юнимейшн» (англ. Unimation от Universal Automation) по производству промышленной робототехники. В 1962 году вышли в свет первые в США промышленные роботы «Версатран» и «Юнимейт», причём некоторые из них функционируют до сих пор, преодолев порог в 100 тысяч часов рабочего ресурса. Если в этих ранних системах соотношение затрат на электронику и механику составляло 75 % к 25 %, то в настоящее время оно изменилось на противоположное. При этом, конечная стоимость электроники продолжает неуклонно снижаться. Появление в 1970-х годах недорогих микропроцессорных систем управления, которые заменили специализированные блоки управления роботов на программируемые контроллеры способствовало снижению стоимости роботов примерно в три раза. Это послужило стимулом для их массового распространения по всем отраслям промышленного производства.
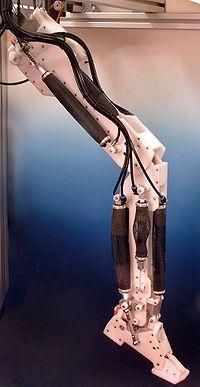
Рисунок 2
5
Использование робототехники в современном мире
Строительная робототехника.
Строительная робототехника, как это понятно из её названия, связана со сферой строительства. То есть работа идёт над разработкой роботов, которых можно будет использовать как при строительстве различных объектов, так и, что интересно, при их разрушении. Трудоёмкость обоих этих процессов высока, да и технологичность каждой операции процесса строительства должна быть на должном уровне. Поэтому использование роботов в этой сфере поможет соблюдать установленные технические стандарты и требования, а также может помочь максимально исключить ошибки, допускаемые из-за человеческого фактора.
Промышленные роботы уже активно используются на заводах и фабриках, при производстве игрушек, чайников, мотоциклов, конфет, а также в производстве действительно сложных изделий, например, автомобилей. Роботы могут без помощи человека варить металл, штамповать, собирать по частям готовые продукты, всё это происходит благодаря особым конструкциям и программам, которые определяют функционал каждого робота. Говоря иными, а именно научными словами, такие устройства предназначены для автоматизации производства — изготовления чего-либо без помощи человека.
Рисунок 4 6
Бытовая робототехника.
Роботы для использования в домохозяйствах, включая персональных роботов, как правило, узко специализированные - каждый под какой-то один вид деятельности. В перспективе можно ожидать появления многофункциональных, универсальных роботов, способных выполнять различные виды деятельности. Жаргонное название - "домашники". Отличаются многообразием видов, в зависимости от назначения. Они могут быть: помощниками для пожилых людей, дворецкими, кухонными работниками, охранниками и т.д.
В данное время всё усиливается спрос на умные дома, они позволяют быстро реконфигурировать одно и то же помещение в соответствие с текущими задачами в режиме реального времени. Электроприводы, повинующиеся заложенной программе или нажатию кнопок в приложении, выдвигают из недр робо-комплекса кроватили или столы, настраивают конфигурацию шкафов и полок. А в роботизированном доме даже перегородки между комнатами могут передвигаться так, как нужно сейчас хозяину. Как в ручном режиме, так и автоматически, например, в таком доме занавески раздвинутся как раз тогда, когда хозяин встает, одновременно включится, например, кофеварка. 
Рисунок 5
7
Медицинская робототехника.
Главной целью развития медицинской робототехники является высокая точность и повышение эффективности лечения, уменьшение рисков нанесения вреда здоровью человека. В настоящее время роботы играют колоссальную роль в развитии современной медицины. Они способствуют точной работе при операциях, помогают провести диагностику и поставить правильный диагноз. Заменяют отсутствующие конечности и органы, восстанавливают и улучшают физические возможности человека, снижают время на госпитализацию, обеспечивают удобство, быстроту реагирования и комфорт, экономят финансовые затраты на обслуживание. Вот некоторые, роботы применяемые в медицине: роботы хирурги, роботизированные протезы, нано роботы и многие другие медицинские роботы. 
Рисунок 6
Космическая робототехника.
Космороботы – это роботы, приспособленные работать в космическом пространстве. Преимущество космических роботов перед человеком заключается в том, что они могут работать в крайне неблагоприятных условиях и обходиться без каких-либо ресурсов, так как в большинстве случаев они работают на солнечных батареях. Также гораздо легче будет пережить потерю такого робота, чем гибель астронавта. Обычно, задача косморобота заключается в проведении какой-нибудь научной деятельности. Вообще-то, тоже самое может сделать и обычный робот, работающий на земной поверхности, но к космороботу есть несколько основных требований, которым он должен соответствовать.
Например:
перенести запуск;
функционировать в сложных условиях враждебной среды;
весить как можно меньше;
потреблять мало энергии и иметь долгий срок службы;
работать в автоматическом режиме;
обладать чрезвычайной надежностью;
Для того, чтобы соответствовать всем этим требованиям, учёные создают все новые и новые устройства, механизмы, приводы, микроконтроллеры, обладающие высокой прочностью и использующим как можно меньше энергии. Эксперты подсчитали, что отправление на Марс человека будет стоить примерно 200-300 миллиардов долларов, при том, что это будет безвозвратное отправление. Еще придется потратить несколько месяцев на психологическую адаптацию участников экспедиции.
А отправка корабля, на борту которого будет робот, обойдется примерно в 5-10 миллиардов долларов. Так что роботы в космосе обходятся намного дешевле, чем люди
.
Рисунок 7
9
Подводная робототехника.
Морские глубины все больше осваиваются человеком. Но они несут с собой не только приобретения, но и очень большую опасность. Поэтому со временем водный мир люди уступят роботам. Подводные роботы, используемые в наши дни, слишком громоздки и неуклюжи. Они построены по образцу сухопутных и потому тратят неоправданно много сил, чтобы преодолеть сопротивление воды. Конечно, они не раз выручали нас. В Балтийском море они обследовали затонувший паром «Эстония», в Атлантике — легендарный «Титаник». Эти увальни берут образцы грунта с морского дна, разведывают месторождения нефти, проверяют состояние плотин и проводят спасательные работы. В настоящее время учёные серьёзно изучают строение и способ передвижения обитателей морских глубин. На основании данных исследований они собираются создать «биоботов» — роботов, сотворенных по подобию «всякой твари плавучей».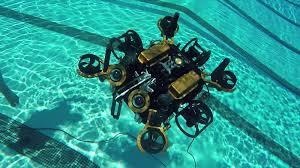
Рисунок 8
10
Заключение
В современной жизни человек уже использует роботов во всех сферах своей деятельности. В большинстве своём роботы являются не заменимыми помощниками, но всё чаще они используются там, где человек справлялся без особого труда. Благодаря своему интеллекту человек развил науку, и смог создать робототехнику, но из-за своей лени он всё чаще стремится заменить свой труд роботами. Но и этого человеку мало, теперь человек пытается создать, для своих роботов, искусственный интеллект. С искусственным интеллектом роботы смогут самостоятельно оценивать происходящее вокруг них и принимать решения по действиям, которые им необходимо произвести. Человеку не надо уже будет тратить силы и время на подачу необходимых команд и алгоритмов. Но такое положение дел может привести к деградации человечества, а возможно и исчезновения, как вида, с лица земли. Вполне возможно, что великие достижения человеческого разума и человеческая лень, могут обернуться против самого человека.
Прейко М., Устройства управления роботами: схемотехника и программирование – М.: Издательство ДМК, 2004, 202с.
http://center.intellektor.ru/Robototechnika
http://robotrends.ru/robopedia/domashnie-roboty
https://robotics.ua/shows/modernity/3345-your_health_health_robotics_today
https://eduherald.ru/ru/article/view?id=14293
https://school-science.ru/3/4/32015
https://www.ronl.ru/referaty/raznoe/655418/
https://ru.wikipedia.org/wiki
11













Вебинар для учителей
Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ